Pan and Tilt Shield¶
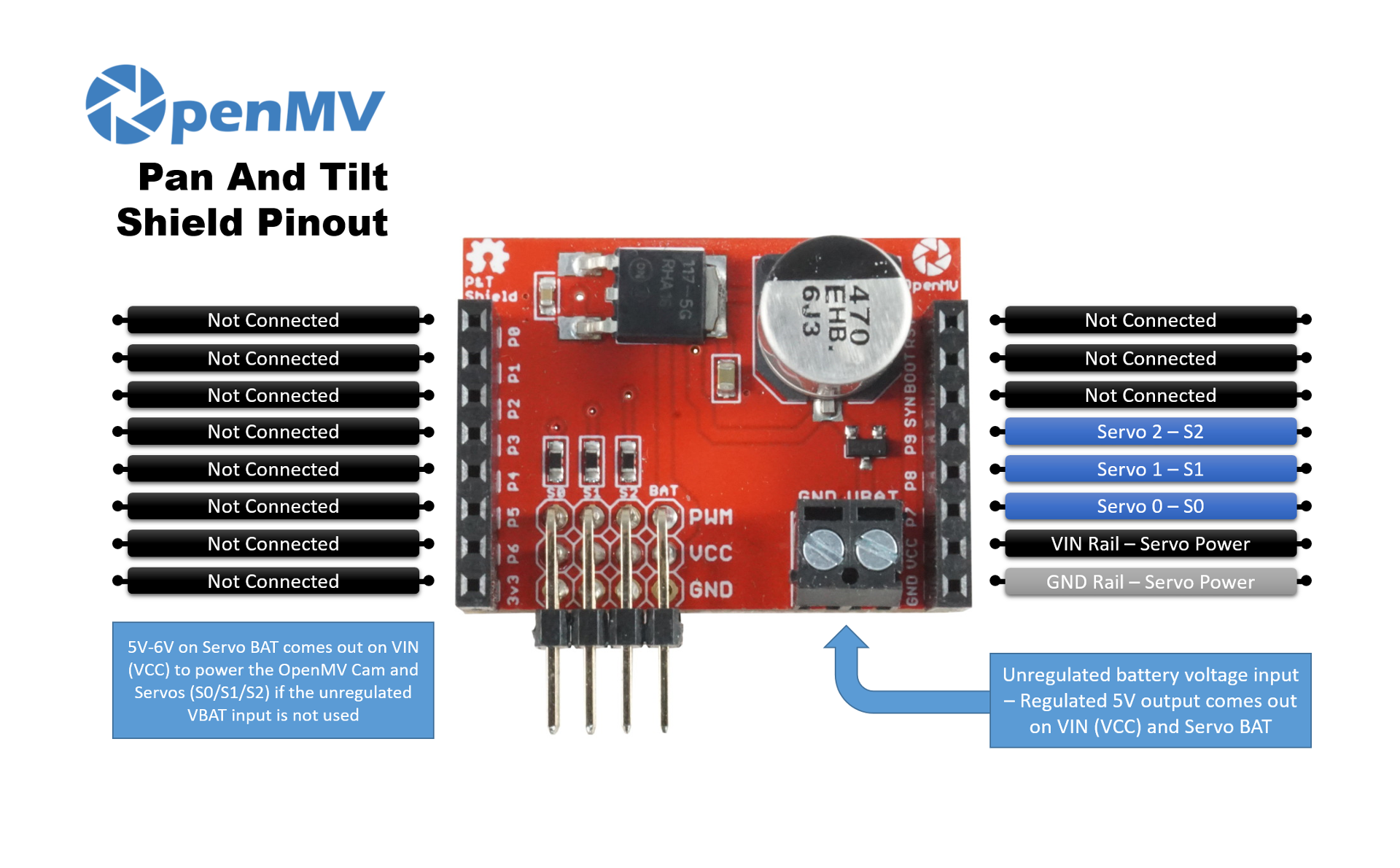
The Pan and Tilt Shield gives the OpenMV Cam three servo channels with an NCP1117 5 V linear regulator that powers both the camera and the servos from a single 6.5–18 V battery input.

For full datasheet, photos, and ordering see the Pan and Tilt Shield product page.
Highlights¶
Three independent servo channels
Stacks with the Servo Shield
Pinout¶
Pin reference¶
Pin |
Function |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
6.5–18 V battery input on the screw terminal (NCP1117 limits) |
VIN out |
5 V regulated from the on-board NCP1117 — powers both the camera and the servo rail |
GND rail |
Servo and camera common ground |
Usage¶
Drive the three servo channels with 50 Hz PWM. The pulse-width range
varies between servos, so tune MIN_US and MAX_US to match
yours — typical values are around 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)