Servo Shield¶
The Servo Shield drives up to eight hobby servos in parallel from the OpenMV Cam over I2C, using a PCA9685 servo / PWM controller.
For full datasheet, photos, and ordering see the Servo Shield product page.
Highlights¶
PCA9685 servo / PWM controller
Eight independent servo channels over I2C
Stacks with the Motor Shield and Pan and Tilt Shield
Pinout¶
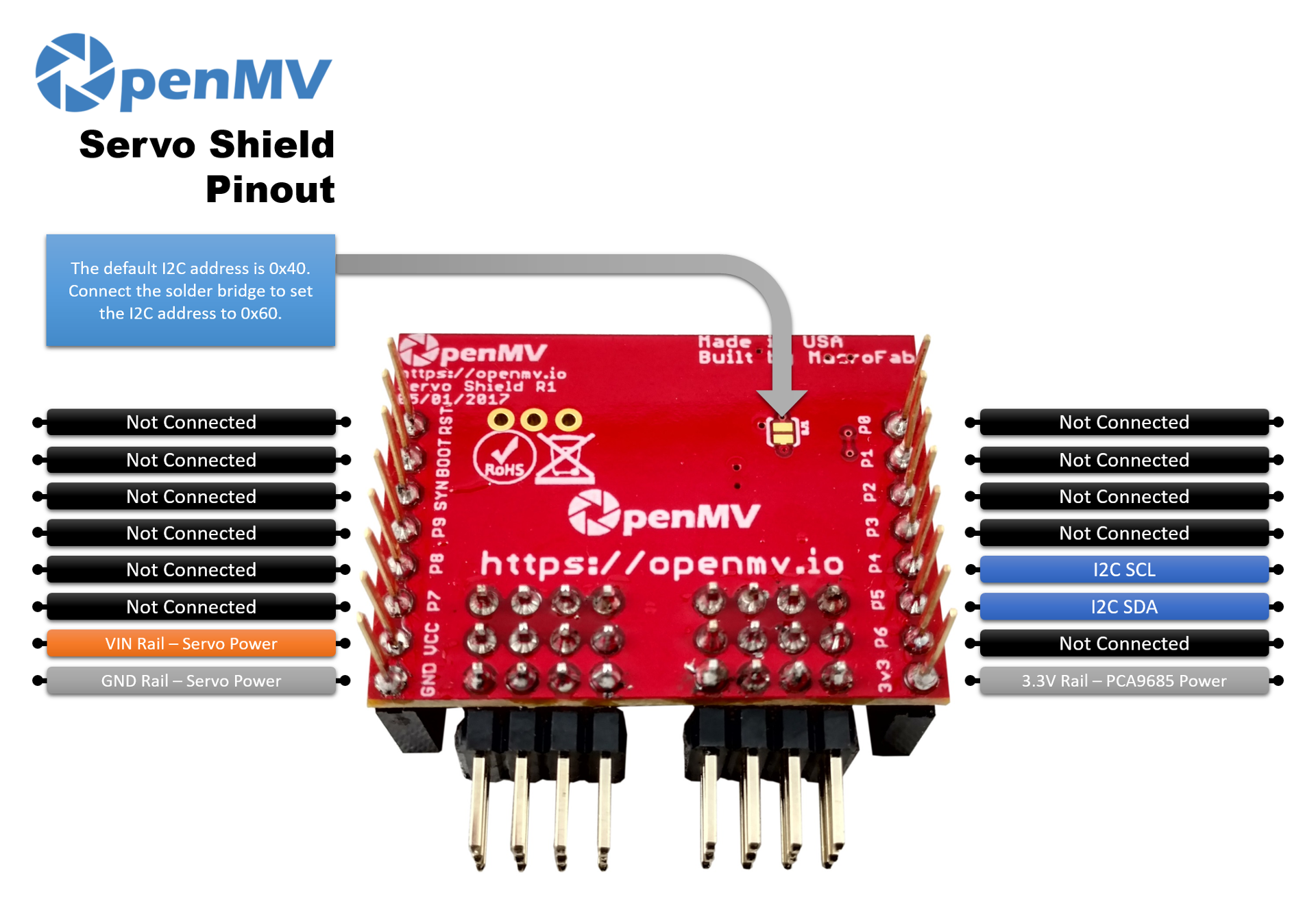
Pin reference¶
Pin |
Function |
|---|---|
P4 |
I²C SCL — clock to the PCA9685 |
P5 |
I²C SDA — data to the PCA9685 |
VIN rail |
Powers the servos (from the camera’s VIN pin) |
3.3V rail |
Powers the PCA9685 logic |
GND rail |
Servo and camera common ground |
The default I²C address is 0x40. Connect the on-board solder
bridge to move the address to 0x60.
Note
The shield draws servo power straight from the camera’s VIN pin. USB does not feed VIN on any OpenMV Cam, so VIN must be supplied externally (battery, bench supply, or similar) — pick a source rated for the combined stall current of every servo you plan to drive.
Usage¶
Drive the eight servo channels through the PCA9685 over I²C. The
pulse-width range varies between servos, so tune MIN_US and
MAX_US to match yours — typical values are around 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
The PCA9685 also handles general 12-bit PWM at any frequency — reuse
the same class with set_duty (0–4095) to, for example, fade an
LED on channel 0 at 1 kHz. The helper below scales a 0.0–100.0%
float onto the chip’s 0–4095 duty range:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)