Módulo Pan e Tilt¶
O Módulo Pan e Tilt fornece à OpenMV Cam três canais de servo com um regulador linear NCP1117 de 5 V que alimenta tanto a câmara como os servos a partir de uma única entrada de bateria de 6,5–18 V.

Para o datasheet completo, fotografias e informações de compra, consulte a página do produto Módulo Pan e Tilt.
Destaques¶
Três canais de servo independentes
Empilha com o Módulo Servo
Pinagem¶
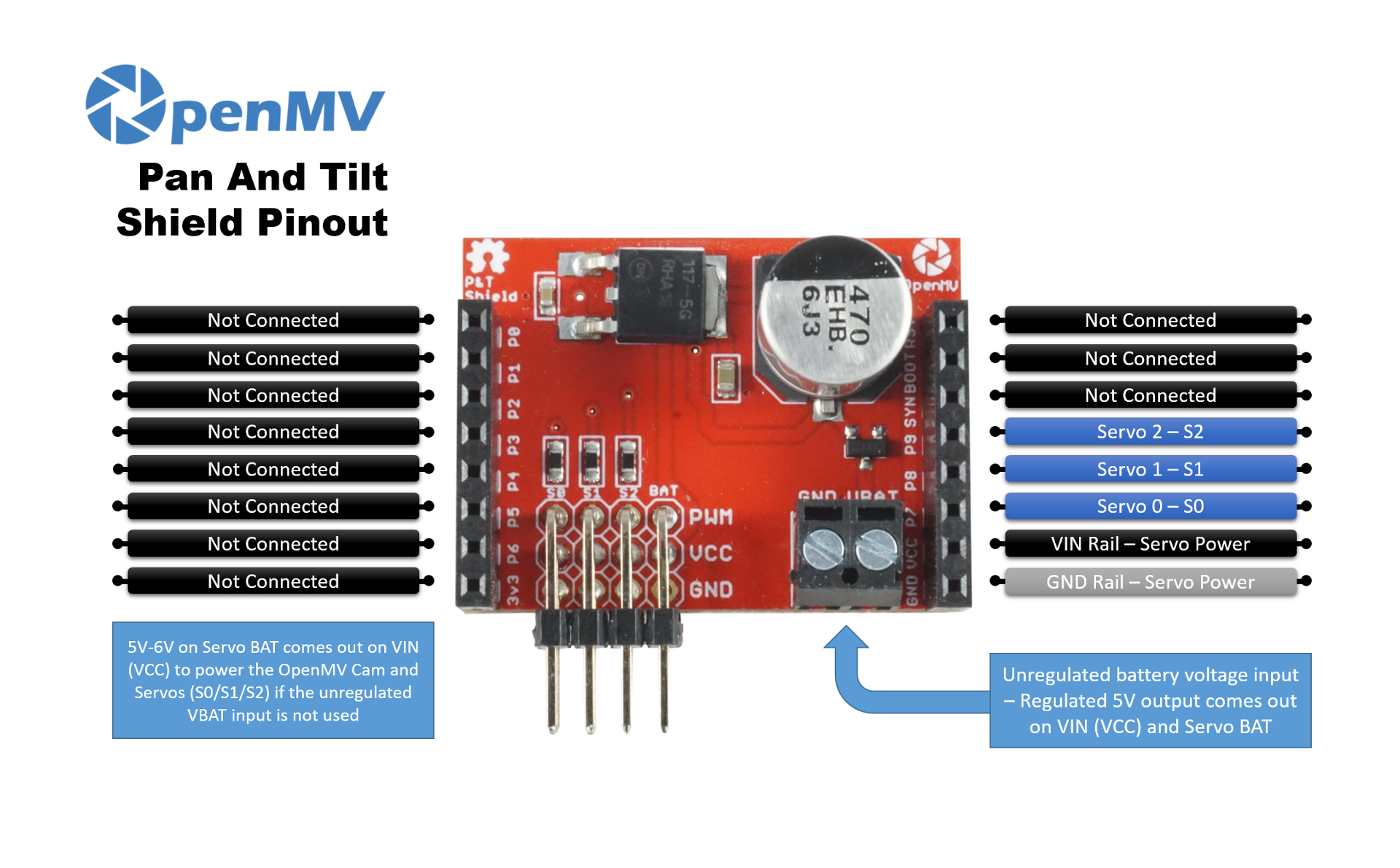
Referência de pinos¶
Pino |
Função |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
Entrada VBAT |
Entrada de bateria de 6,5–18 V no terminal de parafuso (limites do NCP1117) |
Saída VIN |
5 V regulados a partir do NCP1117 integrado — alimenta tanto a câmara como o rail dos servos |
Rail GND |
Terra comum de servos e câmara |
Utilização¶
Acionar os três canais de servo com PWM a 50 Hz. O intervalo de largura de pulso varia entre servos, por isso ajuste MIN_US e MAX_US ao seu modelo — os valores típicos situam-se entre 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)