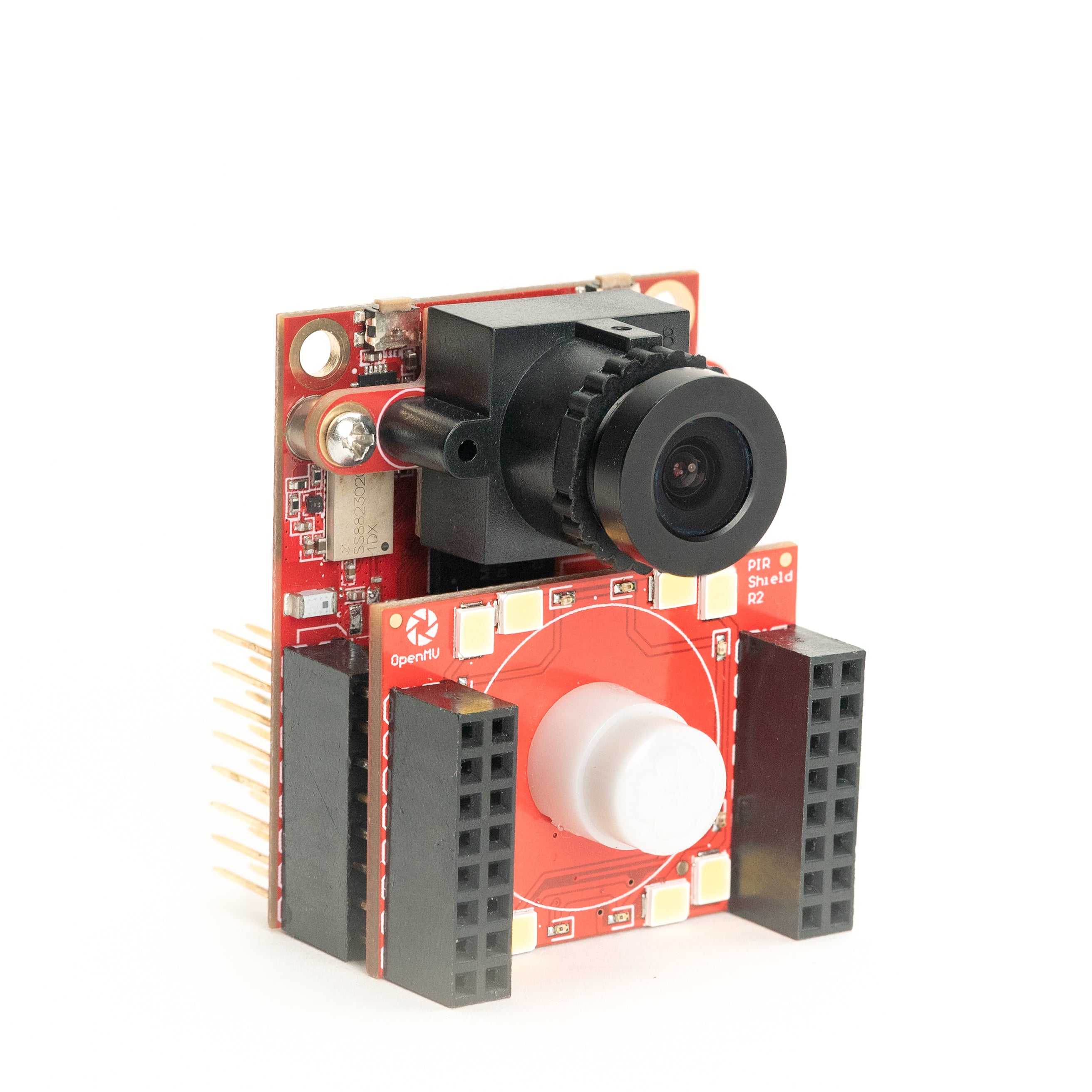
PIR Shield¶
O PIR Shield acorda a OpenMV Cam do modo de suspensão profunda quando deteta movimento, consome apenas 6 µA em modo de espera e adiciona oito LEDs brancos mais oito LEDs infravermelhos de 850 nm para iluminação. Ideal para câmaras de vigilância e câmaras de trilho alimentadas por bateria.
Para a ficha técnica completa, fotos e encomendas, consulte a página do produto PIR Shield.
Destaques¶
Sensor PIR com 6 µA em modo de espera para anos de funcionamento com bateria
Oito LEDs brancos de 3500 K e oito LEDs IR de 850 nm (com regulação PWM)
Pinout¶
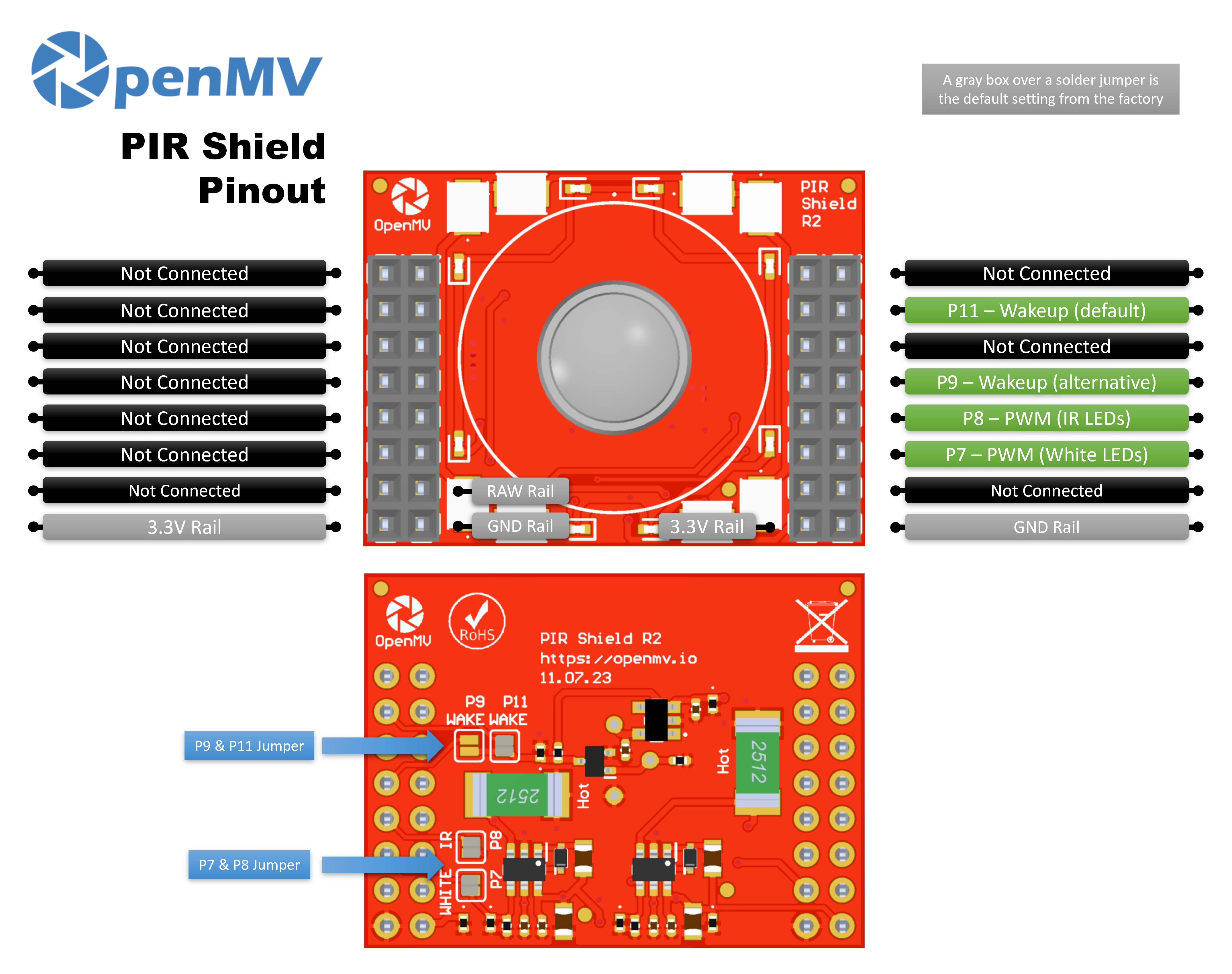
Referência de pinos¶
Pino |
Função |
|---|---|
P7 |
Controlo PWM para os LEDs brancos |
P8 |
Controlo PWM para os LEDs IR de 850 nm |
P9 |
Ativação (alternativa) |
P11 |
Ativação (predefinida) — fica em nível baixo quando o PIR deteta movimento |
Barramento RAW |
Alimentação permanente para o sensor PIR — mantém a deteção de movimento ativa enquanto a câmara está em suspensão profunda |
Barramento 3.3V |
Alimenta a eletrónica a bordo do shield |
Barramento GND |
Massa comum |
Nota
Cada um dos pinos P7, P8, P9 e P11 pode ser recuperado para uso independente. P7, P8 e P11 estão ligados por predefinição através de pontes de solda no verso — abra a ponte no pino que pretende libertar. P9 está desligado por predefinição: faça a ponte no verso para encaminhar o sinal de ativação para P9 (e abra a ponte de P11 para libertar P11).
Nota
P11 é o pino de ativação em todas as OpenMV Cams modernas — mantenha o shield na sua configuração predefinida para acordar do modo deepsleep() com movimento. A alternativa P9 existe para OpenMV Cams antigas, que não têm uma linha de ativação dedicada — P9 fica num GPIO normal que se monitoriza por polling ou ao qual se associa uma IRQ.
Utilização¶
Regulação PWM dos LEDs de iluminação branca e IR:
from machine import PWM, Pin
white = PWM(Pin("P7"), freq=50_000, duty_u16=0)
ir = PWM(Pin("P8"), freq=50_000, duty_u16=0)
white.duty_u16(32_768) # 50% white
ir.duty_u16(16_384) # 25% IR
Acordar a câmara do modo de suspensão profunda com movimento. P11 (a linha de ativação predefinida) fica em nível baixo quando o PIR é acionado e reinicia a câmara:
from machine import deepsleep
deepsleep() # the next motion event resets the camera