Pan and Tilt Shield¶
Pan and Tilt Shield memberikan OpenMV Cam tiga saluran servo dengan regulator linear NCP1117 5 V yang memberi daya pada kamera dan servo dari satu input baterai 6.5–18 V.

Untuk datasheet lengkap, foto, dan pemesanan lihat halaman produk Pan and Tilt Shield.
Sorotan¶
Tiga saluran servo independen
Dapat ditumpuk dengan Servo Shield
Pinout¶
Referensi pin¶
Pin |
Fungsi |
|---|---|
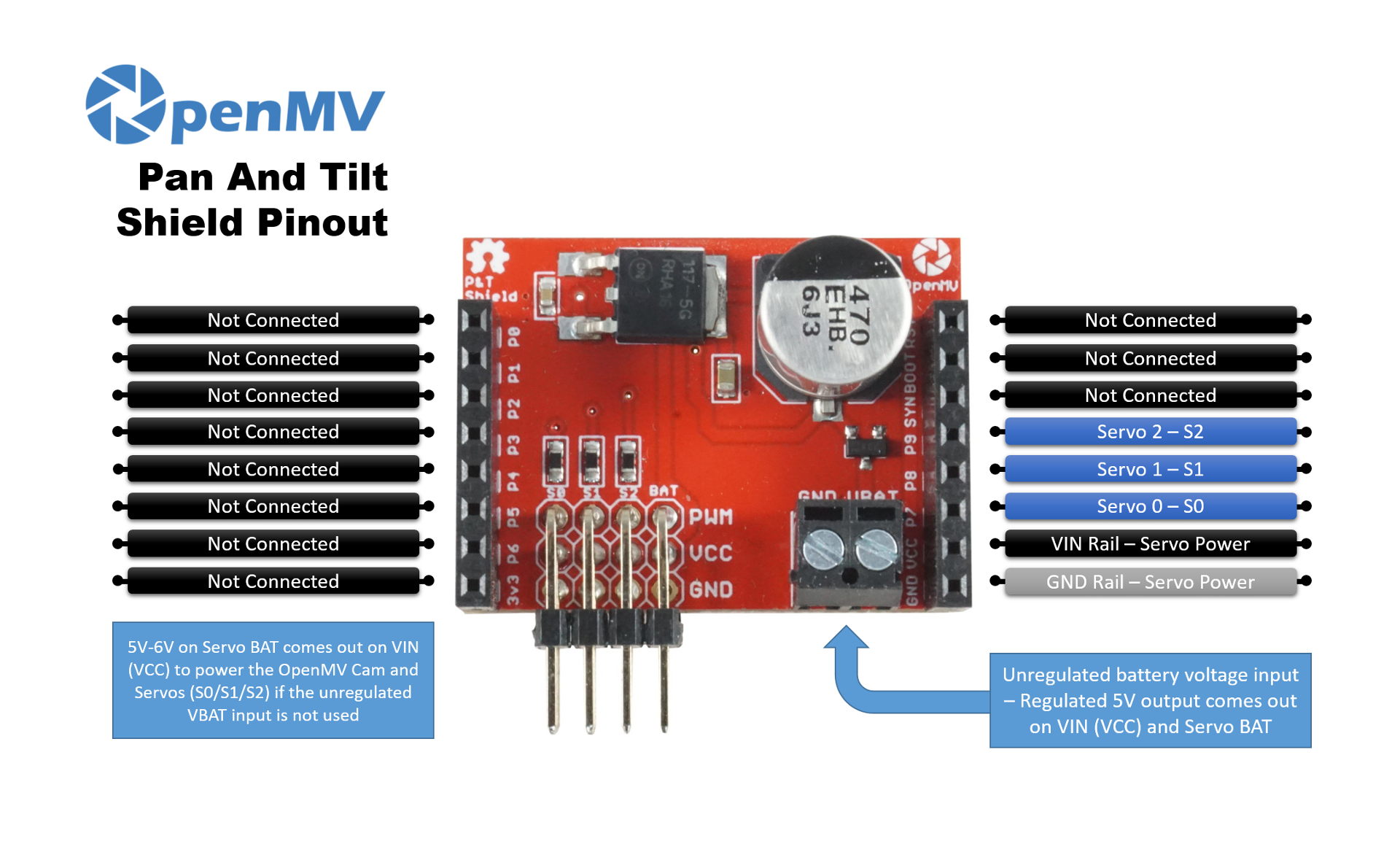
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
Input baterai 6.5–18 V pada terminal sekrup (batas NCP1117) |
VIN out |
5 V teregulasi dari NCP1117 on-board — memberi daya pada kamera dan rail servo |
Rail GND |
Ground bersama servo dan kamera |
Penggunaan¶
Gerakkan tiga saluran servo dengan PWM 50 Hz. Rentang lebar pulsa bervariasi antar servo, jadi sesuaikan MIN_US dan MAX_US dengan servo Anda — nilai umum sekitar 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)