Щит Pan and Tilt¶
Щит Pan and Tilt надає OpenMV Cam три канали для сервоприводів з лінійним стабілізатором NCP1117 на 5 В, який живить і камеру, і сервоприводи від єдиного акумулятора 6,5–18 В.

Повну документацію, фотографії та інформацію про замовлення дивіться на сторінці продукту Pan and Tilt Shield.
Особливості¶
Три незалежних канали для сервоприводів
Стекується з щитом Servo
Розпіновка¶
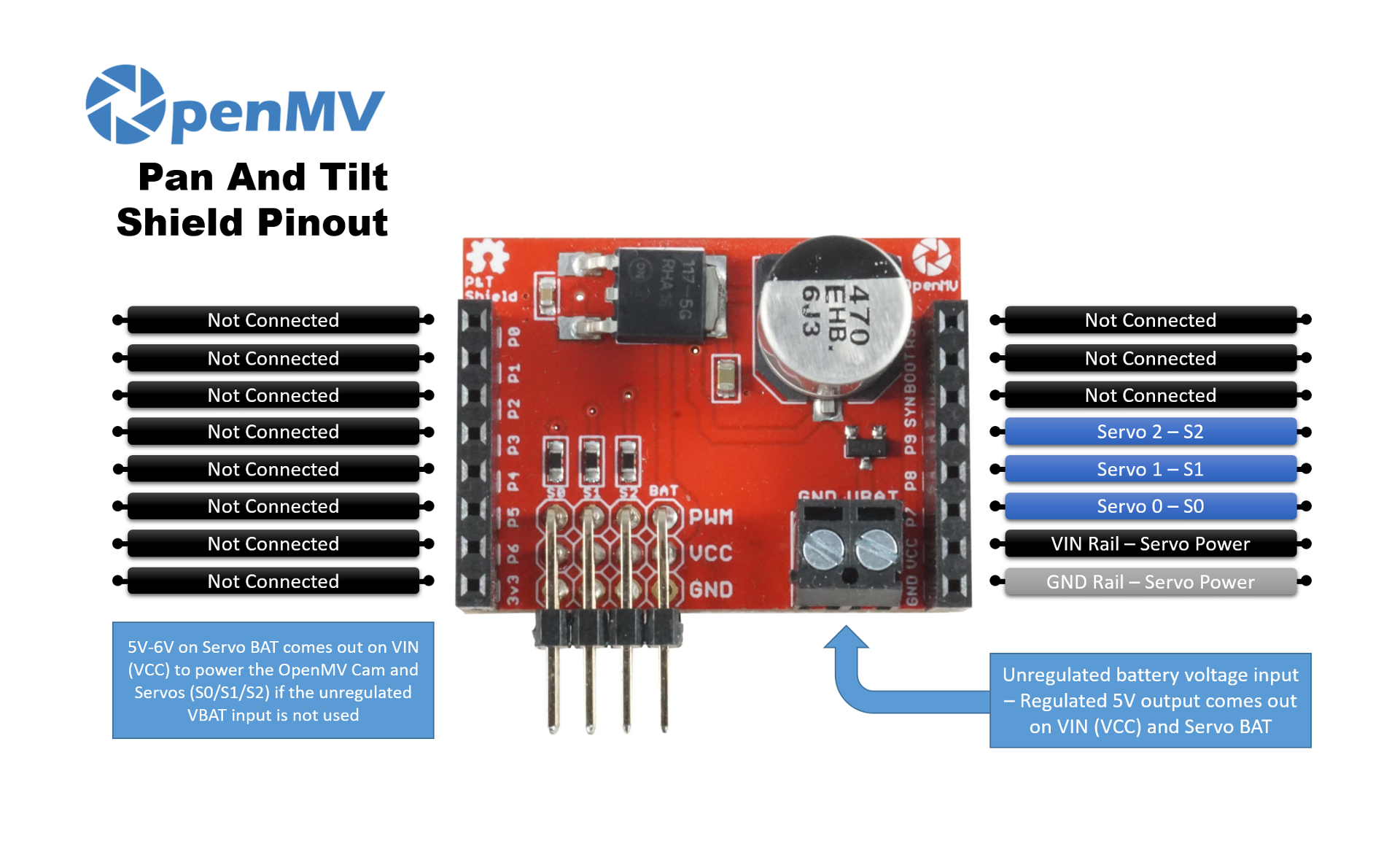
Довідник виводів¶
Вивід |
Функція |
|---|---|
P7 |
Сервопривід 0 (S0) |
P8 |
Сервопривід 1 (S1) |
P9 |
Сервопривід 2 (S2) |
VBAT вхід |
Вхід акумулятора 6,5–18 В на гвинтовій клемі (обмеження NCP1117) |
VIN вихід |
Стабілізовані 5 В від вбудованого NCP1117 — живить і камеру, і шину сервоприводів |
Шина GND |
Загальна земля для сервоприводів і камери |
Використання¶
Керуйте трьома каналами сервоприводів за допомогою PWM з частотою 50 Гц. Діапазон тривалості імпульсу залежить від конкретного сервоприводу, тому налаштуйте MIN_US та MAX_US відповідно до свого — типові значення становлять приблизно 1000–2000 мкс:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)