13.7.5. การนำไปใช้งานบนกล้อง¶
โมเดลที่ฝึกแล้วอยู่บนเซิร์ฟเวอร์ของ Roboflow การนำขึ้นกล้องต้องดาวน์โหลดหนึ่งครั้ง จากนั้นทำขั้นตอนเดียวกับการโหลดโมเดลอื่นๆ
13.7.5.1. การดาวน์โหลดค่าน้ำหนัก¶
บนหน้า Deployments เลือก Deploy to 3rd Party Platforms และเลือกแท็บ OpenMV ซึ่งจะดาวน์โหลดค่าน้ำหนักของโมเดลเป็นไฟล์ .tflite แบบ integer-quantized ไฟล์เดียว ตั้งชื่อตามโปรเจกต์และเวอร์ชัน นี่คือรูปแบบ int8 ที่ TFLite engine ของกล้องรองรับ
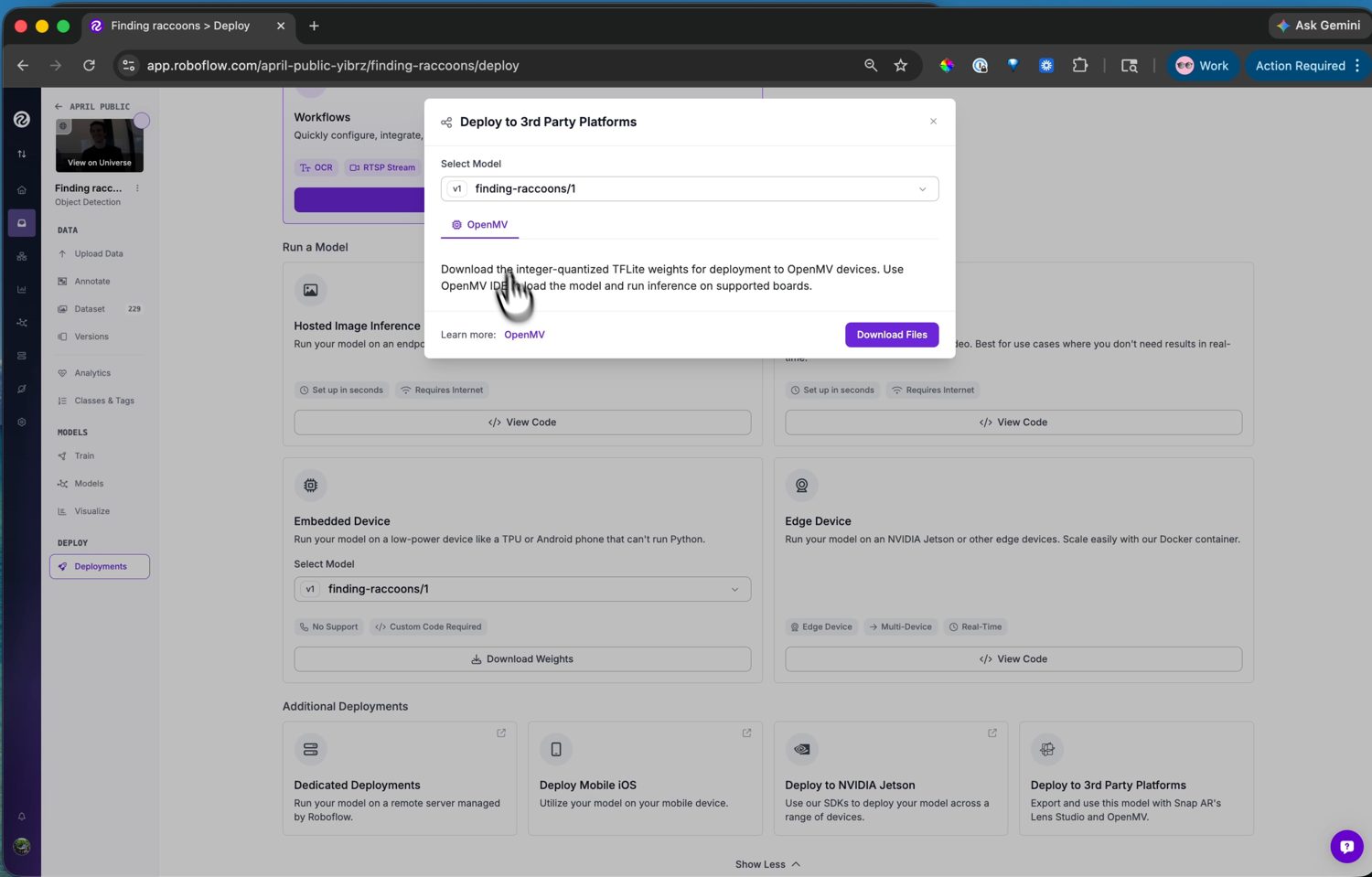
เป้าหมายการนำไปใช้งาน OpenMV -- Download Files บันทึกค่าน้ำหนัก .tflite ที่พร้อมใช้กับกล้อง¶
13.7.5.2. การโหลดลงบนกล้อง¶
เพิ่มไฟล์ .tflite ลงในกล้องด้วย ตัวแก้ไข ROMFS ของ IDE ซึ่งจะแปลงไฟล์สำหรับ NPU ของบอร์ดหากมี จากนั้นโหลดในสคริปต์ด้วย ml.Model โมเดลยังสามารถรันจากไดรฟ์แฟลชของกล้องได้ โดยคัดลอกไฟล์ไปและชี้ ml.Model ไปที่เส้นทาง แต่ ROMFS เป็นที่เก็บที่ดีกว่า โมเดลที่นั่นรันตรงจากแฟลชโดยไม่ต้องคัดลอกไป RAM
เอาต์พุตดิบของโมเดลการตรวจจับคือ tensor ของพิกัดกรอบและคะแนนคลาสที่ยังต้องถอดรหัส ตัวตรวจจับตระกูล YOLO ของ Roboflow ถอดรหัสด้วยตัวประมวลผลหลังที่กล้องรวมมาใน ml.postprocessing.ultralytics ดังนั้นโค้ดไม่กี่บรรทัดก็เชื่อมโมเดลกับตัวถอดรหัส และคุณจะได้กรอบและป้ายกำกับ
See also
บทการเรียนรู้ของเครื่อง สำหรับการรันโมเดลด้วยโมดูล ml ครอบคลุมการโหลด ไปป์ไลน์การอนุมาน และ คำแนะนำการถอดรหัสเอาต์พุตตระกูล YOLO