13.7.5. Mendeploy ke kamera¶
Model yang telah dilatih berada di server Roboflow. Memindahkannya ke kamera memerlukan satu unduhan, kemudian langkah yang sama seperti memuat model lainnya.
13.7.5.1. Mengunduh bobot¶
Pada halaman Deployments, pilih Deploy to 3rd Party Platforms dan pilih tab OpenMV. Ini mengunduh bobot model sebagai file .tflite tunggal dengan kuantisasi integer, dinamai sesuai proyek dan versi -- format int8 yang dijalankan oleh engine TFLite kamera.
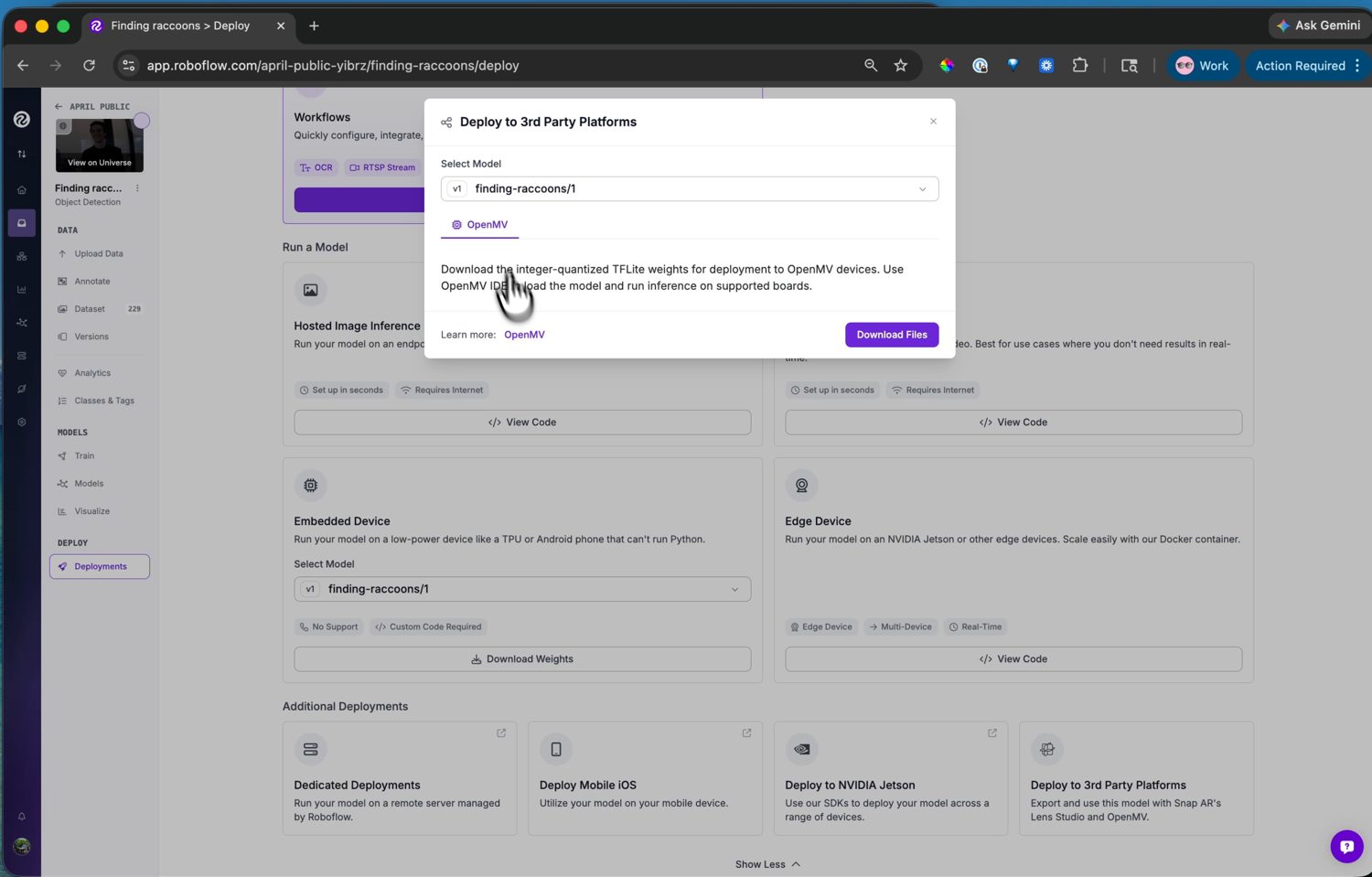
Target deploy OpenMV -- Download Files menyimpan bobot .tflite yang siap untuk kamera.¶
13.7.5.2. Memuatnya di kamera¶
Tambahkan file .tflite ke kamera dengan editor ROMFS IDE, yang mengonversinya untuk NPU board saat board memilikinya, kemudian muat dalam skrip dengan ml.Model. Model juga dapat berjalan dari flash drive kamera -- salin file dan arahkan ml.Model ke path -- tetapi ROMFS adalah tempat yang lebih baik: model di sana dieksekusi langsung dari flash tanpa salinan RAM.
Output mentah model deteksi adalah tensor koordinat kotak dan skor kelas yang masih perlu didekode. Detektor keluarga YOLO Roboflow didekode dengan post-processor yang dikirimkan kamera di ml.postprocessing.ultralytics, sehingga beberapa baris menghubungkan model ke decodernya dan Anda mendapatkan kotak dan label.
Lihat juga
Bab machine learning untuk menjalankan model dengan modul ml -- pemuatan, pipeline inferensi, dan panduan dekoding output keluarga YOLO.