13.7.5. Розгортання на камеру¶
Навчена модель (МН) знаходиться на серверах Roboflow. Щоб перенести її на камеру, потрібно одне завантаження, а потім ті самі кроки, що й завантаження будь-якої іншої моделі.
13.7.5.1. Завантаження ваг¶
На сторінці Deployments виберіть Deploy to 3rd Party Platforms і перейдіть на вкладку OpenMV. Це завантажує ваги моделі у вигляді єдиного файлу .tflite з цілочисельним квантуванням, названого за проектом і версією — формат int8, який виконує рушій TFLite камери.
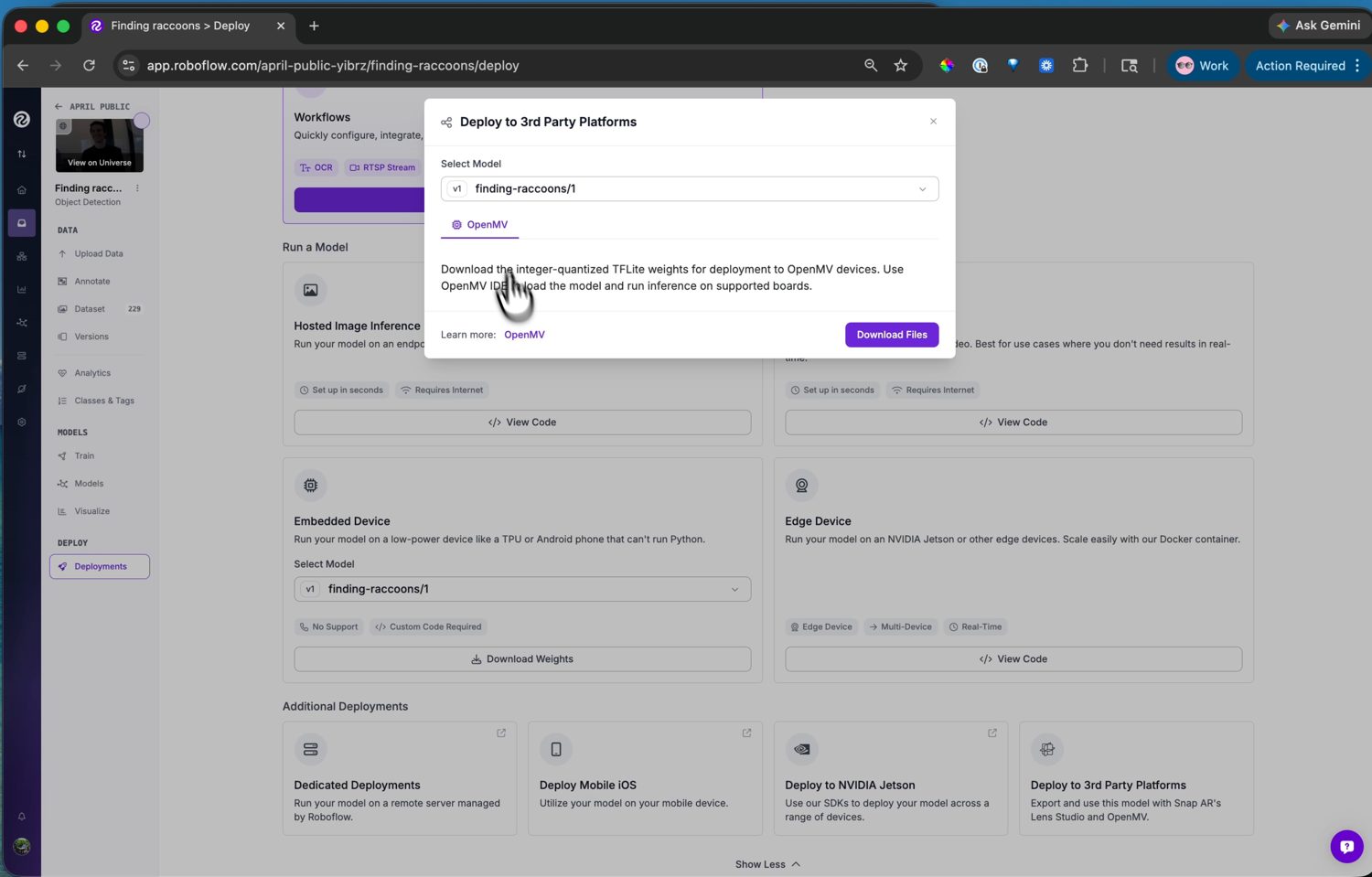
Ціль розгортання OpenMV — Download Files зберігає ваги .tflite, готові до використання на камері.¶
13.7.5.2. Завантаження на камеру¶
Додайте файл .tflite на камеру за допомогою редактора ROMFS IDE, який конвертує його для NPU плати, якщо така є, а потім завантажте його в скрипт за допомогою ml.Model. Моделі також можна запускати з флеш-накопичувача камери — скопіюйте файл і вкажіть ml.Model на шлях — але ROMFS є кращим місцем: моделі там виконуються безпосередньо з флеш-пам’яті без копії в RAM.
Необроблений вивід детекційної моделі — це тензор координат рамок і оцінок класів, який ще потребує декодування. Детектори сімейства YOLO від Roboflow декодуються за допомогою пост-процесорів, які постачаються з камерою у ml.postprocessing.ultralytics, тому кілька рядків підключають модель до її декодера, і ви отримуєте рамки та мітки.
Дивись також
Розділ про машинне навчання для запуску моделей з модулем ml — завантаження, конвеєр інференсу та покрокова інструкція з декодування виводу сімейства YOLO.