13.1.12. Mengedit sistem file ROM¶
Board dengan dukungan ROMFS membawa sistem file hanya-baca di flash, dipasang di kamera pada /rom. Board ini dikirim dengan model machine learning default board, dan di sinilah model dan aset produk berada: file di ROMFS dipetakan langsung dari flash ke memori, sehingga model besar dapat dimuat tanpa mengkonsumsi RAM untuk salinan. Submenu Tools → ROM File System IDE adalah editor untuk itu.
13.1.12.1. Editor¶
Edit ROMFS on OpenMV Cam membaca ROMFS kamera yang terhubung dan membukanya di editor: pohon file ditambah tombol untuk menambah file, membuat folder, menghapus dan mengekstrak entri, serta menarik model langsung dari model zoo. Pembacaan penggunaan melacak seberapa banyak partisi ROMFS board yang ditempati oleh konten. Tidak ada yang menyentuh kamera hingga Anda menekan Commit, yang menanyakan apakah akan menulis hasilnya kembali ke kamera atau menyimpannya ke file .img di disk.
Dua konversi terjadi secara otomatis saat Anda menambahkan file. Skrip .py dikompilasi silang ke bytecode .mpy untuk board target, dan file model dikonversi untuk akselerator NPU board jika board memilikinya dan model memerlukannya. Yang masuk ke ROMFS selalu dalam bentuk yang langsung dieksekusi oleh kamera.
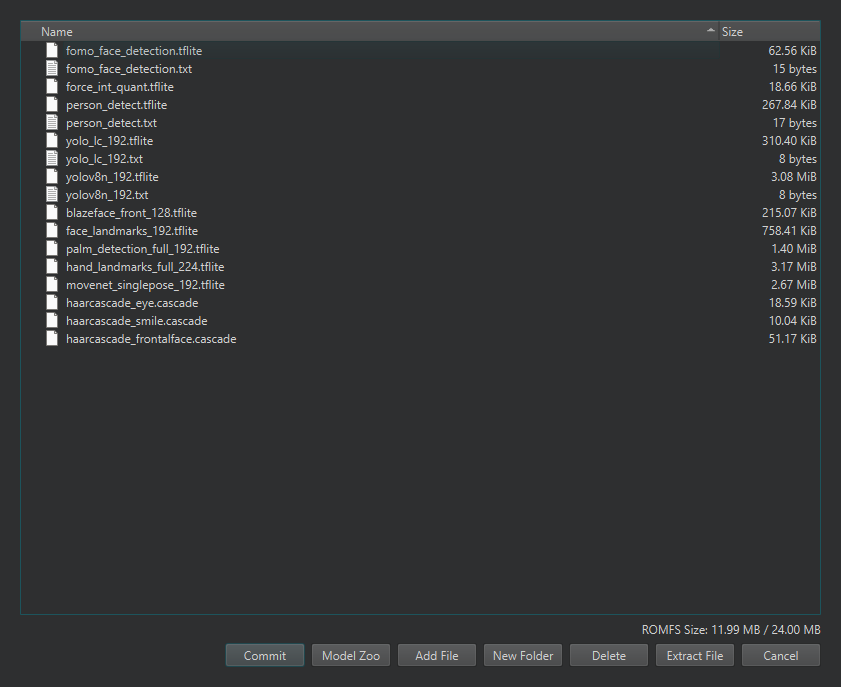
Dialog Edit ROMFS menampilkan konten default board -- model machine learning-nya -- dengan pembacaan penggunaan di kanan bawah.¶
Open ROMFS File menjalankan editor yang sama terhadap file image .img di disk alih-alih kamera yang terhubung, dan New ROMFS File memulainya kosong -- apa pun, jalur untuk mempersiapkan image ROMFS secara offline, untuk di-flash dalam produksi atau dikirim bersama build firmware kustom. Reset ROMFS on OpenMV Cam mengembalikan ROMFS kamera yang terhubung ke default board, membatalkan semua pengeditan.
Lihat juga
Membangun citra ROMFS untuk peran ROMFS dalam pengiriman aplikasi -- apa yang harus diletakkan di sana, dan bagaimana kamera membacanya saat runtime.