CAN/RS232 Shield¶
CAN/RS232 Shield kombinira CAN-FD primopredajnik s RS-232 primopredajnikom tako da OpenMV Cam može komunicirati s vozilima, kontrolerima i starijom serijskom opremom s jednog shielda, uz široki raspon ulaznog napajanja i zaštitu od obrnutog napona.
Za potpunu tehničku dokumentaciju, fotografije i naručivanje pogledajte stranicu proizvoda CAN/RS232 Shield.
Istaknute značajke¶
8 Mb/s CAN-FD s ugrađenom terminacijom i filtriranjem
1 Mb/s RS-232 s integriranim filtriranjem
Ulaz od 6-36 V, tolerantan na obrnuti napon
0-5 V ADC ulaz s prenaponskom zaštitom od ±36 V
0-5 V digitalni U/I za okidače sinkronizacije kamere, sa zaštitom od kratkog spoja
Raspored pinova¶
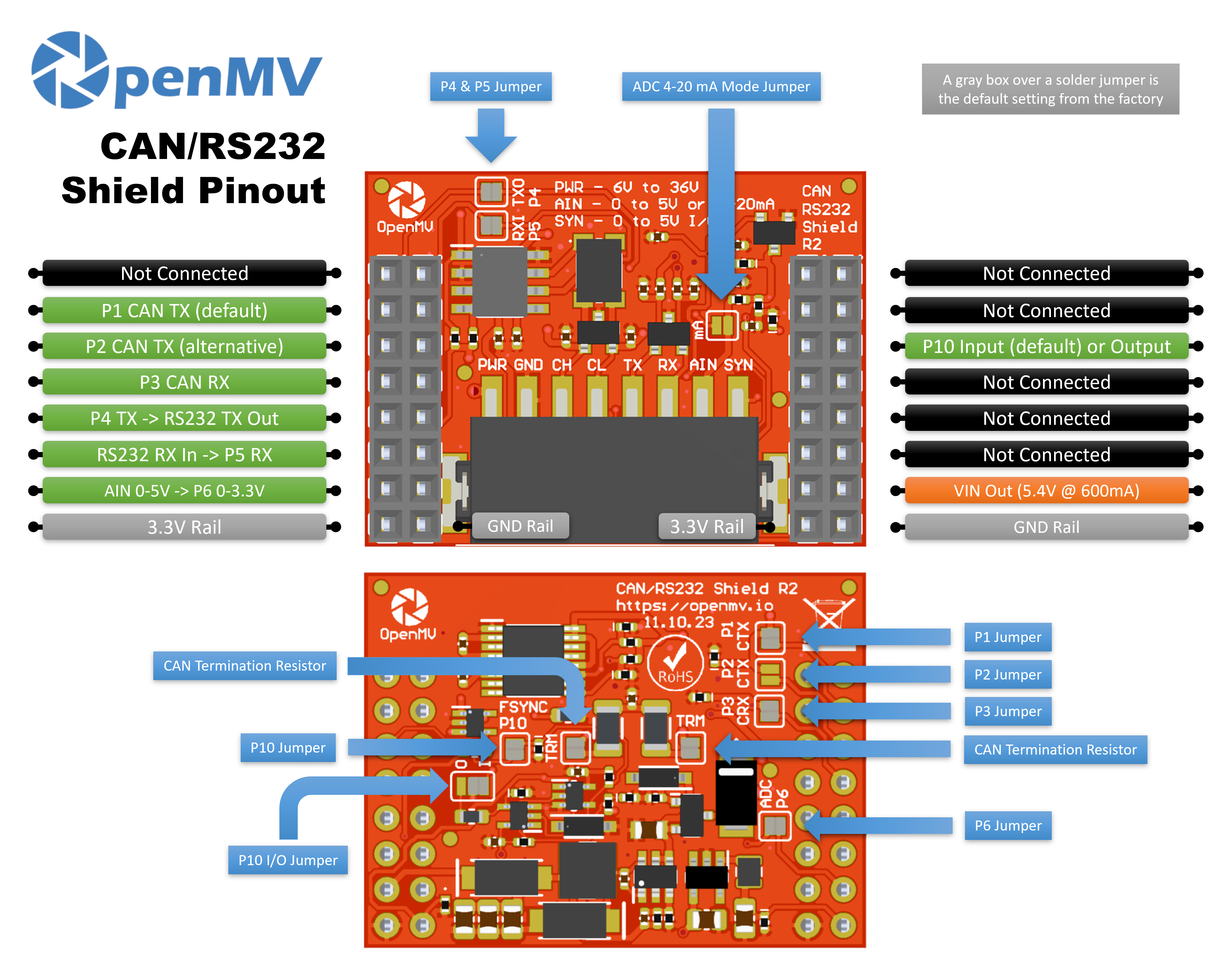
Referenca pinova¶
Pin |
Funkcija |
|---|---|
P1 |
CAN TX → ulaz primopredajnika (zadano) |
P2 |
CAN TX → ulaz primopredajnika (alternativno) |
P3 |
CAN RX ← izlaz primopredajnika |
P4 |
RS-232 TX → pobuđuje izlaznu liniju |
P5 |
RS-232 RX ← prima ulaznu liniju |
P6 |
AIN očitanje s pomaknutom razinom (0–3.3 V na P6) |
P10 |
SYN — open-drain digitalni U/I na rednom priključku |
PWR ulaz |
Širok ulaz od 6–36 V na redni priključak (tolerantan na obrnuti napon) |
AIN ulaz |
Analogni ulaz na rednom priključku |
VIN izlaz |
5.4 V do 600 mA iz ugrađenog regulatora |
3.3V napajanje |
Napaja elektroniku na samom shieldu |
GND napajanje |
Zajednička masa |
Napomena
AIN je prenaponski zaštićen do ±36 V i zadano je naponski ulaz od 0–5 V, skaliran na 0–3.3 V na P6. Premostite shunt za način rada 4–20 mA na prednjoj strani shielda kako biste AIN prebacili na strujni ulaz petlje 4–20 mA.
Napomena
SYN je open-drain digitalna linija, podignuta na 3.3 V na strani kamere i 5 V na strani SYN priključka. Zadano je ulaz — shield pomiče razinu s 0–5 V na SYN na 0–3.3 V na P10. Promijenite lemni premosnik na pločici kako biste P10 prebacili u izlaz, pomičući razinu s 0–3.3 V na P10 na 0–5 V na SYN.
Napomena
Svaki od pinova P1, P2, P3, P4, P5, P6 i P10 može se preuzeti za druge namjene. P1, P3, P4, P5, P6 i P10 zadano su spojeni — P1, P3, P6 i P10 preko lemnih premosnika na stražnjoj strani, a P4 i P5 preko lemnih premosnika na prednjoj strani. Otvorite premosnik na bilo kojem pinu koji želite osloboditi. P2 je zadano odspojen: premostite njegov stražnji premosnik kako biste CAN TX umjesto toga usmjerili na P2 (i otvorite stražnji premosnik za P1 kako biste oslobodili P1).
Napomena
Podjela P1/P2 postoji kako bi shield radio s različitim porodicama procesora. OpenMV Cam IMXRT pločice (RT1062) mogu usmjeriti CAN na P1, pa koriste zadano mapiranje. STM32 pločice ne mogu doći do P1 svojom CAN periferijom, pa premostite stražnji premosnik za P2 (i otvorite onaj za P1) kako biste koristili alternativu.
Napomena
Terminacija CAN sabirnice zadano je spojena — podijeljena na dvije polovice od 60 Ω u seriji između CANH i CANL s kondenzatorom prema masi na sredini (120 Ω AC-spregnuta podijeljena terminacija). Otvorite dvije lemne pločice kako biste neovisno odspojili svaku polovicu.
Upotreba¶
Napomena
Brojevi periferija CAN(0) i UART(1) u nastavku slijede IMXRT mapiranje (zadano ožičenje P1). Na drugom procesoru sabirnica ožičena na ove pinove može biti drugačija — provjerite referencu svoje pločice.
Slanje i primanje CAN-FD sličica — TX na P1 (zadano) ili P2 (alternativno), RX na P3:
from machine import CAN
can = CAN(2, 1_000_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
Odjek bajtova preko RS-232 na P4 (TX) / P5 (RX):
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello\n")
print(uart.read())
Očitajte ulaz AIN rednog priključka kroz pin P6 s pomaknutom razinom:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reagirajte na silazni brid na liniji SYN — primjerice, za sinkronizaciju kamere s drugim uređajem koji povlači SYN nisko:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)