CAN/RS232 Shield¶
CAN/RS232 Shield kombinuje CAN-FD transceiver s RS-232 transceiverem, takže OpenMV Cam může z jednoho shieldu komunikovat s vozidly, řídicími jednotkami a starší sériovou technikou, s napájením širokým vstupem a ochranou proti přepólování.
Kompletní datasheet, fotografie a možnosti objednání najdete na produktové stránce CAN/RS232 Shield.
Hlavní vlastnosti¶
CAN-FD rychlostí 8 Mb/s s terminací a filtrováním na desce
RS-232 rychlostí 1 Mb/s s integrovaným filtrováním
Vstup 6–36 V, odolný proti přepólování
ADC vstup 0–5 V s ochranou proti přepětí ±36 V
Digitální I/O 0–5 V pro synchronizační spouště kamery, s ochranou proti zkratu
Rozložení pinů¶
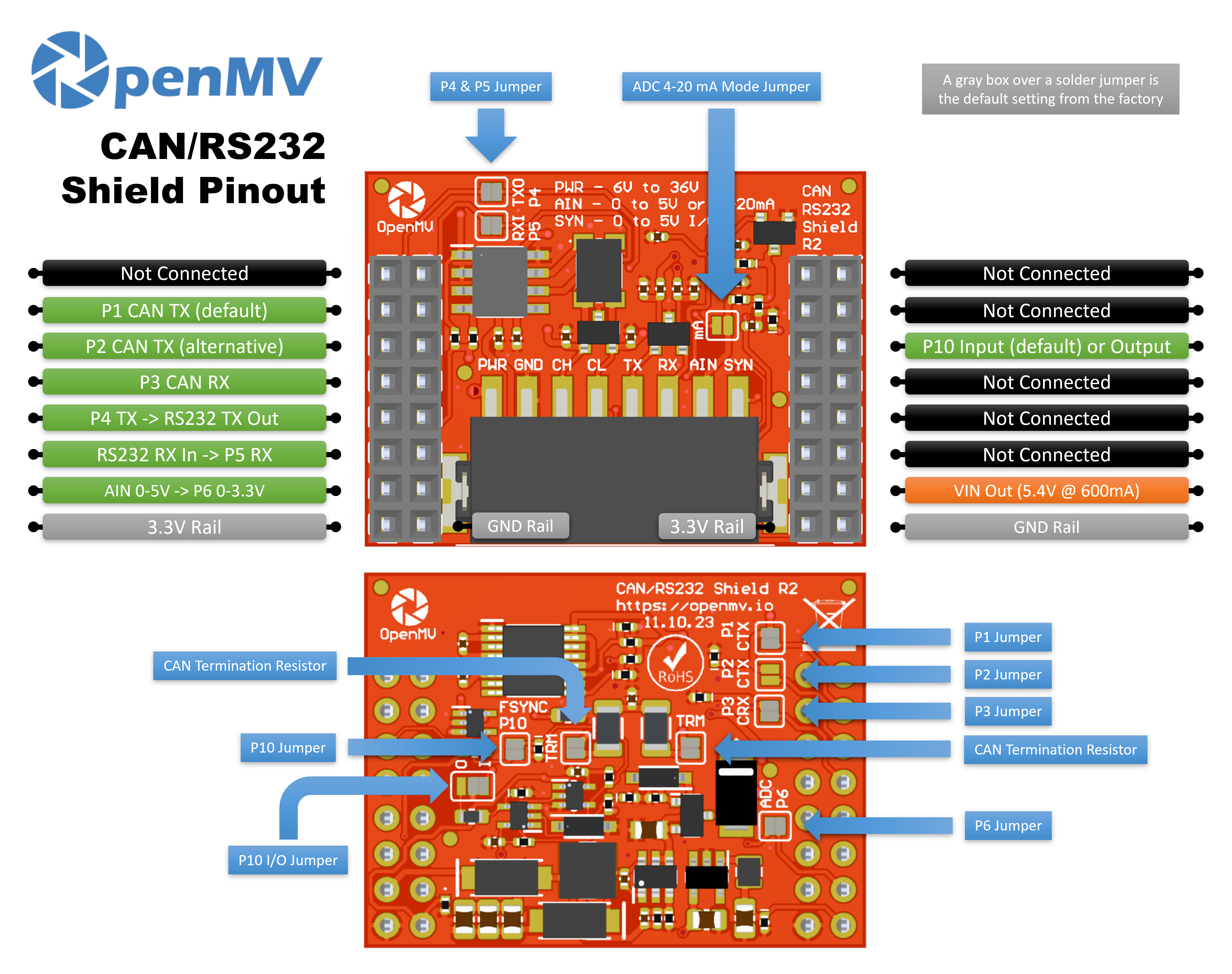
Přehled pinů¶
Pin |
Funkce |
|---|---|
P1 |
CAN TX → vstup transceiveru (výchozí) |
P2 |
CAN TX → vstup transceiveru (alternativní) |
P3 |
CAN RX ← výstup transceiveru |
P4 |
RS-232 TX → budí výstupní linku |
P5 |
RS-232 RX ← přijímá vstupní linku |
P6 |
Úrovňově převedené čtení AIN (0–3,3 V na P6) |
P10 |
SYN — digitální I/O s otevřeným kolektorem na svorkovnici |
PWR in |
Široký vstup 6–36 V na svorkovnici (odolný proti přepólování) |
AIN in |
Analogový vstup na svorkovnici |
VIN out |
5,4 V až do 600 mA z regulátoru na desce |
Napájecí větev 3,3 V |
Napájí elektroniku na desce shieldu |
Zemnicí větev GND |
Společná zem |
Poznámka
AIN je chráněn proti přepětí až do ±36 V a ve výchozím stavu je napěťovým vstupem 0–5 V, zmenšeným na 0–3,3 V na P6. Propojením můstku režimu 4–20 mA na přední straně shieldu přepnete AIN na proudový vstup 4–20 mA.
Poznámka
SYN je digitální linka s otevřeným kolektorem, na straně kamery zatažená k 3,3 V a na straně svorky SYN k 5 V. Ve výchozím stavu je to vstup — shield úrovňově převádí 0–5 V na SYN dolů na 0–3,3 V na P10. Změnou pájecí propojky na desce přepnete P10 na výstup, který úrovňově převádí 0–3,3 V na P10 nahoru na 0–5 V na SYN.
Poznámka
Každý z pinů P1, P2, P3, P4, P5, P6 a P10 lze znovu využít pro jiné účely. P1, P3, P4, P5, P6 a P10 jsou ve výchozím stavu připojeny — P1, P3, P6 a P10 přes pájecí propojky na zadní straně, P4 a P5 přes pájecí propojky na přední straně. Rozpojte propojku u kteréhokoli pinu, který chcete uvolnit. P2 je ve výchozím stavu odpojen: propojením jeho zadní propojky přesměrujete CAN TX místo toho na P2 (a rozpojením zadní propojky P1 uvolníte P1).
Poznámka
Rozdělení P1/P2 existuje proto, aby shield fungoval napříč rodinami procesorů. Desky OpenMV Cam IMXRT (RT1062) mohou směrovat CAN na P1, takže používají výchozí mapování. Desky STM32 nemohou se svou CAN periferií dosáhnout na P1, takže pro použití alternativy propojte zadní propojku P2 (a rozpojte propojku P1).
Poznámka
Terminace CAN sběrnice je ve výchozím stavu připojena — rozdělená na dvě poloviny po 60 Ω v sérii mezi CANH a CANL s kondenzátorem k zemi ve středovém bodě (rozdělená terminace 120 Ω s AC vazbou). Rozpojením dvou pájecích plošek odpojíte každou polovinu nezávisle.
Použití¶
Poznámka
Čísla periferií CAN(0) a UART(1) níže odpovídají mapování IMXRT (výchozí zapojení P1). Na jiném procesoru může být sběrnice zapojená na tyto piny jiná — zkontrolujte referenci své desky.
Odesílejte a přijímejte CAN-FD snímky — TX na P1 (výchozí) nebo P2 (alternativní), RX na P3:
from machine import CAN
can = CAN(2, 1_000_000)
can.set_filters(None)
can.send(0x123, b"\xDE\xAD\xBE\xEF")
print(can.recv())
Vracejte byty zpět (echo) přes RS-232 na P4 (TX) / P5 (RX):
from machine import UART
uart = UART(1, baudrate=115200)
uart.write("hello\n")
print(uart.read())
Čtěte vstup AIN ze svorkovnice přes úrovňově převedený pin P6:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reagujte na sestupnou hranu na lince SYN — například pro synchronizaci kamery s jiným zařízením, které stahuje SYN do nízké úrovně:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)