Servo Shield¶
Servo Shield z OpenMV Cam paralelně ovládá až osm modelářských serv přes I2C, s použitím servo / PWM kontroléru PCA9685.
Úplný datasheet, fotografie a možnosti objednání najdete na stránce produktu Servo Shield.
Hlavní vlastnosti¶
Servo / PWM kontrolér PCA9685
Osm nezávislých servo kanálů přes I2C
Lze skládat s Motor Shieldem a Pan and Tilt Shieldem
Pinout¶
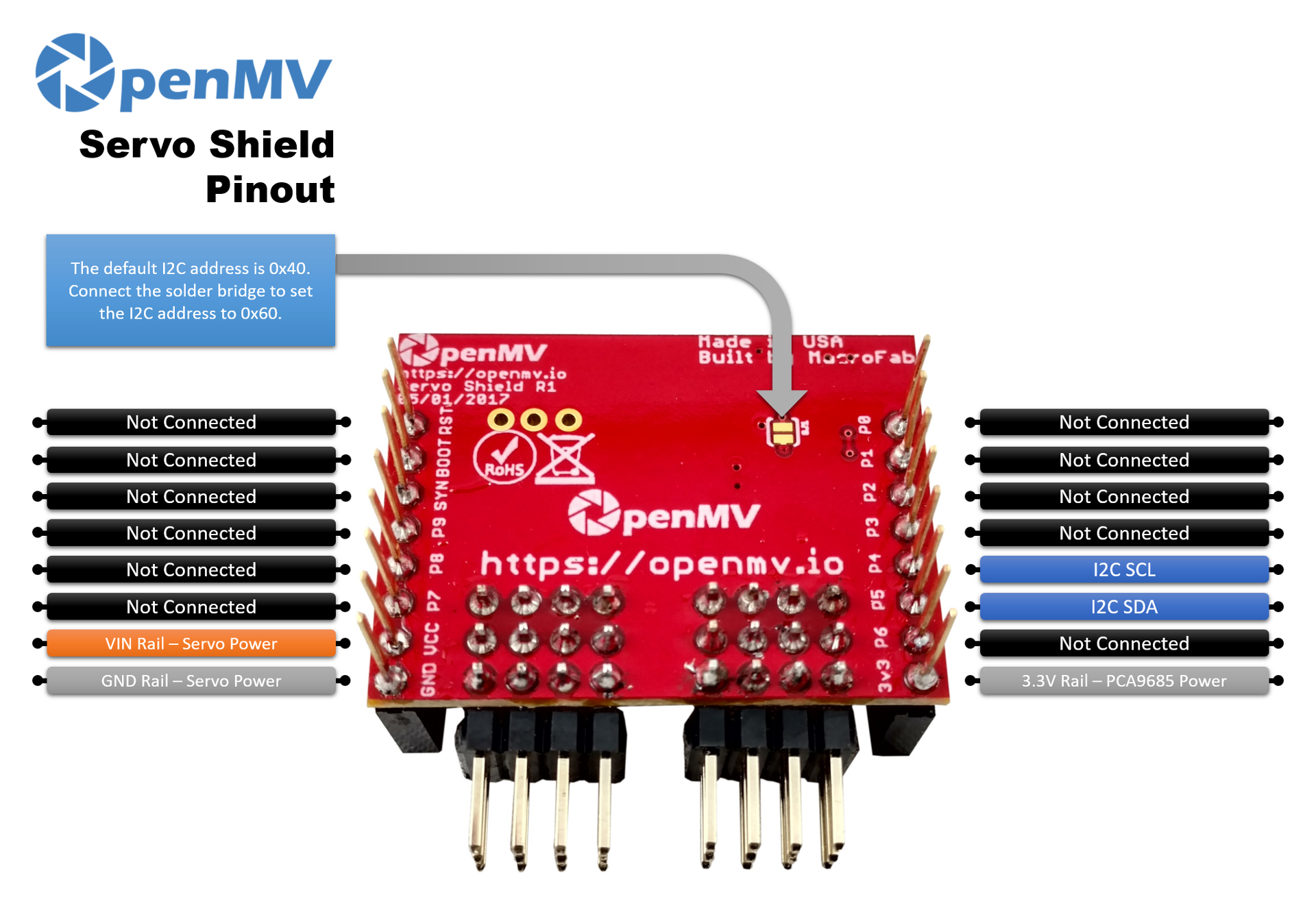
Přehled pinů¶
Pin |
Funkce |
|---|---|
P4 |
I²C SCL — hodiny do PCA9685 |
P5 |
I²C SDA — data do PCA9685 |
Větev VIN |
Napájí serva (z pinu VIN kamery) |
Napájecí větev 3,3 V |
Napájí logiku PCA9685 |
Větev GND |
Společná zem serv a kamery |
Výchozí I²C adresa je 0x40. Propojením palubní pájecí propojky přesunete adresu na 0x60.
Poznámka
Shield odebírá napájení serv přímo z pinu VIN kamery. USB nenapájí VIN na žádné OpenMV Cam, takže VIN musí být napájen externě (baterie, laboratorní zdroj nebo podobně) — zvolte zdroj dimenzovaný na celkový rozběhový proud všech serv, která hodláte ovládat.
Použití¶
Ovládejte osm servo kanálů přes PCA9685 po I²C. Rozsah šířky pulzu se mezi servy liší, proto vyladěte MIN_US a MAX_US tak, aby odpovídaly vašim — typické hodnoty jsou kolem 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 také zvládá obecné 12bitové PWM na libovolné frekvenci — využijte tutéž třídu s set_duty (0–4095) například k plynulému rozsvícení LED na kanálu 0 na 1 kHz. Pomocná funkce níže škáluje desetinné číslo 0,0–100,0 % na rozsah střídy 0–4095 čipu:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)