Servo Shield¶
A Servo Shield egy PCA9685 szervó / PWM vezérlőt használva akár nyolc hobbi szervót hajt meg párhuzamosan az OpenMV Cam-ről I2C-n keresztül.
A teljes adatlapért, fényképekért és rendelésért lásd a Servo Shield termékoldalt.
Kiemelt jellemzők¶
PCA9685 szervó / PWM vezérlő
Nyolc független szervócsatorna I2C-n keresztül
Egymásra rakható a Motor Shielddel és a Pan and Tilt Shielddel
Lábkiosztás¶
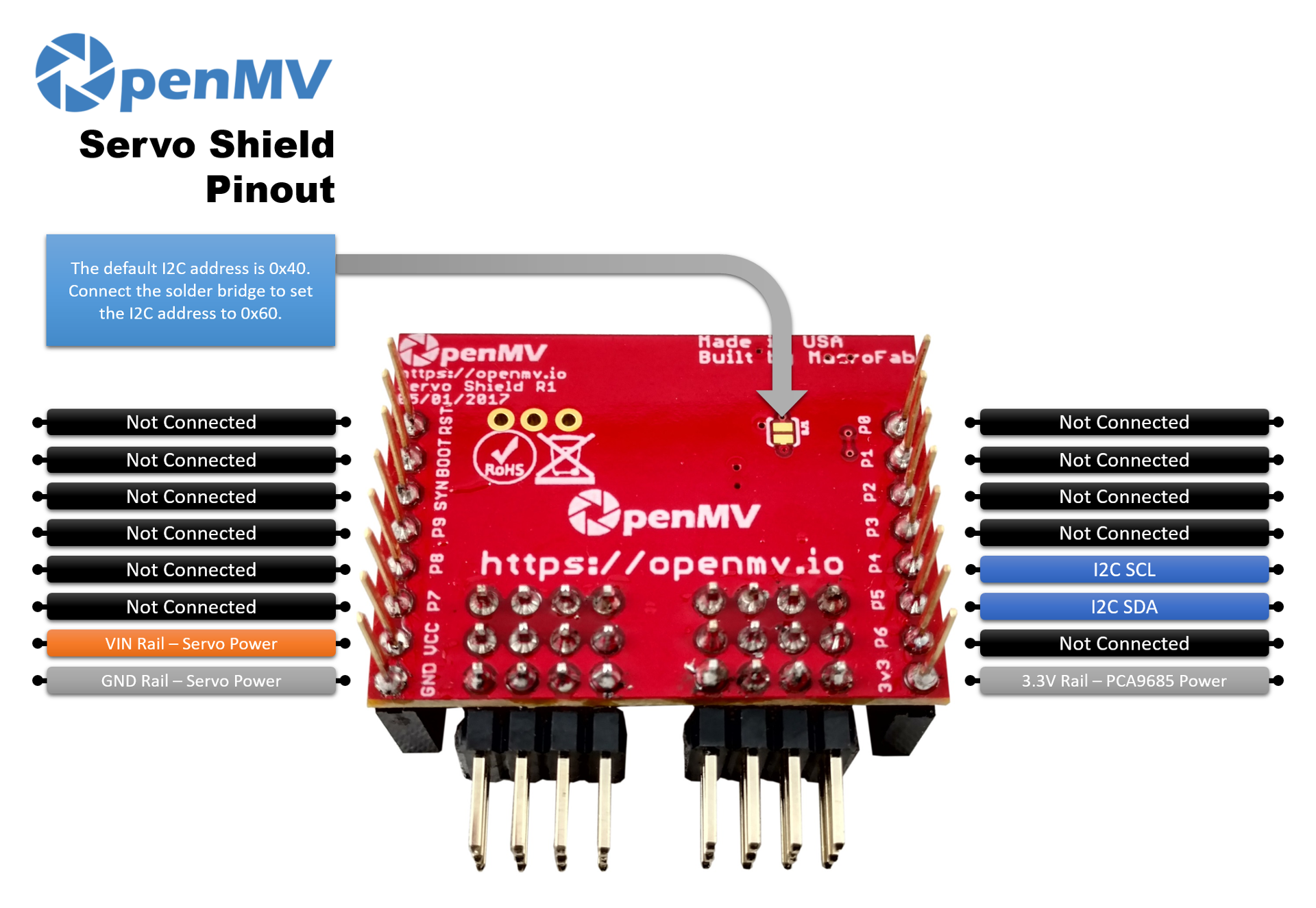
Láb-referencia¶
Láb |
Funkció |
|---|---|
P4 |
I²C SCL — órajel a PCA9685-höz |
P5 |
I²C SDA — adat a PCA9685-höz |
VIN sín |
A szervókat táplálja (a kamera VIN lábáról) |
3,3V sín |
A PCA9685 logikáját táplálja |
GND sín |
Szervó és kamera közös föld |
Az alapértelmezett I²C cím 0x40. Kösd össze a beépített forrasztott áthidalót, hogy a címet 0x60-ra módosítsd.
Megjegyzés
A shield a szervók tápellátását közvetlenül a kamera VIN lábáról veszi. Az USB egyetlen OpenMV Cam-en sem táplálja a VIN-t, ezért a VIN-t külsőleg kell biztosítani (akkumulátor, laboratóriumi tápegység vagy hasonló) — válassz olyan forrást, amelynek névleges teljesítménye megfelel az összes meghajtani kívánt szervó együttes blokkolóáramának.
Használat¶
Hajtsd meg a nyolc szervócsatornát a PCA9685-ön keresztül I²C-n. Az impulzusszélesség-tartomány szervónként eltér, ezért hangold a MIN_US és MAX_US értékeket a sajátodhoz — a tipikus értékek 1000–2000 µs körüliek:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
A PCA9685 általános 12 bites PWM-et is kezel tetszőleges frekvencián — használd újra ugyanazt az osztályt a set_duty (0–4095) metódussal, hogy például egy LED-et halványíts a 0. csatornán 1 kHz-en. Az alábbi segédfüggvény egy 0,0–100,0%-os lebegőpontos értéket skáláz a chip 0–4095-ös kitöltési tartományára:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)