Pan and Tilt Shield¶
A Pan and Tilt Shield három szervócsatornát ad az OpenMV Cam-nek egy NCP1117 5 V-os lineáris szabályozóval, amely egyetlen 6,5–18 V-os akkumulátor-bemenetről táplálja mind a kamerát, mind a szervókat.

A teljes adatlapért, fényképekért és rendelési információkért lásd a Pan and Tilt Shield termékoldalt.
Kiemelt jellemzők¶
Három független szervócsatorna
Rakásolható a Servo Shielddel
Lábkiosztás¶
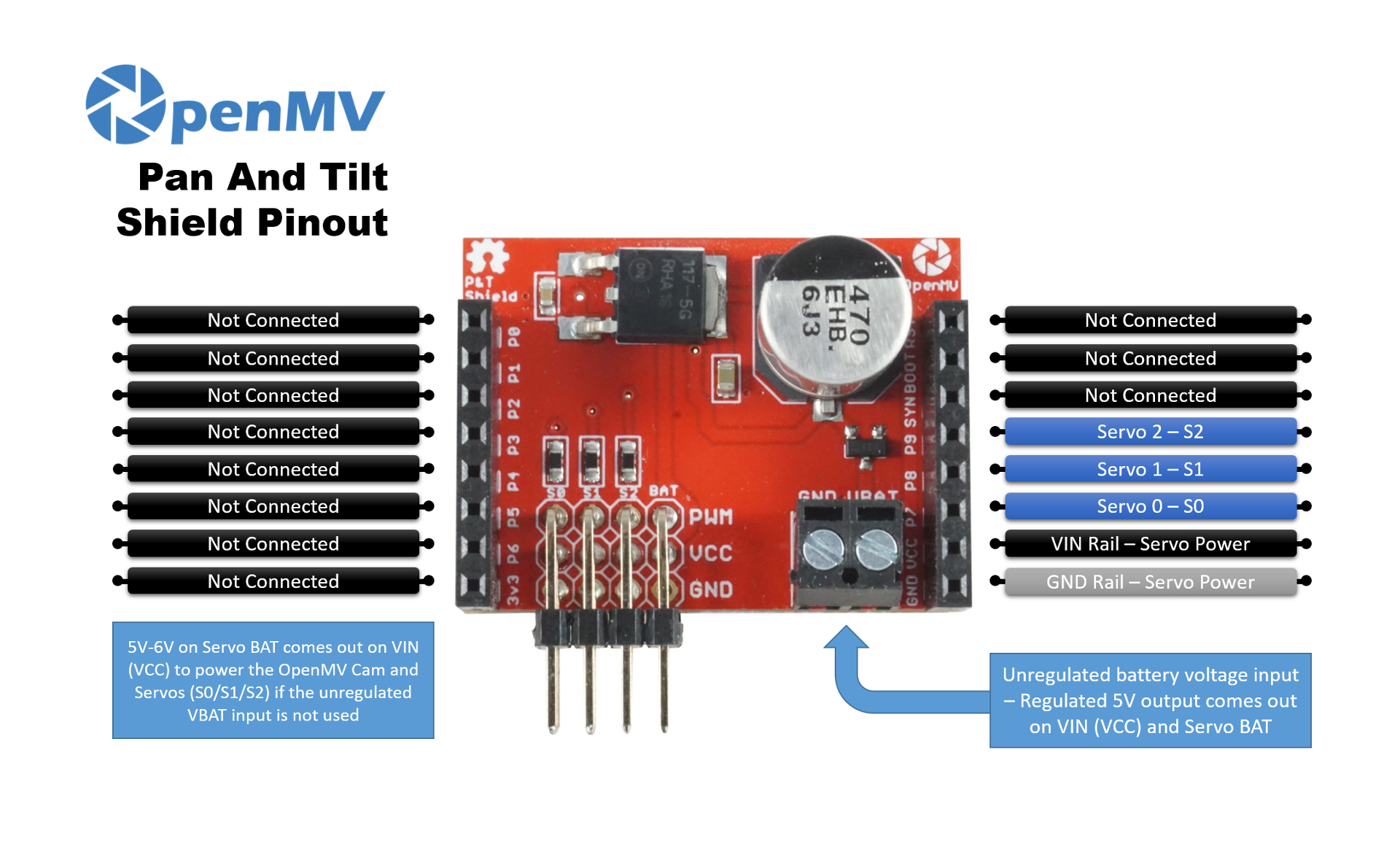
Lábkiosztás-referencia¶
Láb |
Funkció |
|---|---|
P7 |
Szervó 0 (S0) |
P8 |
Szervó 1 (S1) |
P9 |
Szervó 2 (S2) |
VBAT be |
6,5–18 V akkumulátor-bemenet a csavaros sorkapcson (NCP1117 korlátok) |
VIN ki |
5 V szabályozott feszültség a fedélzeti NCP1117-ből — mind a kamerát, mind a szervósínt táplálja |
GND-sín |
Szervó és kamera közös föld |
Használat¶
Hajtsd a három szervócsatornát 50 Hz-es PWM-mel. Az impulzusszélesség-tartomány szervónként eltér, ezért hangold a MIN_US és MAX_US értékeket a sajátodhoz — a tipikus értékek 1000–2000 µs körül vannak:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)