Pan and Tilt Shield¶
Il Pan and Tilt Shield fornisce all’OpenMV Cam tre canali servo con un regolatore lineare a 5 V NCP1117 che alimenta sia la camera sia i servo da un singolo ingresso a batteria 6.5–18 V.

Per il datasheet completo, le foto e gli ordini consulta la pagina prodotto del Pan and Tilt Shield.
Punti salienti¶
Tre canali servo indipendenti
Impilabile con il Servo Shield
Pinout¶
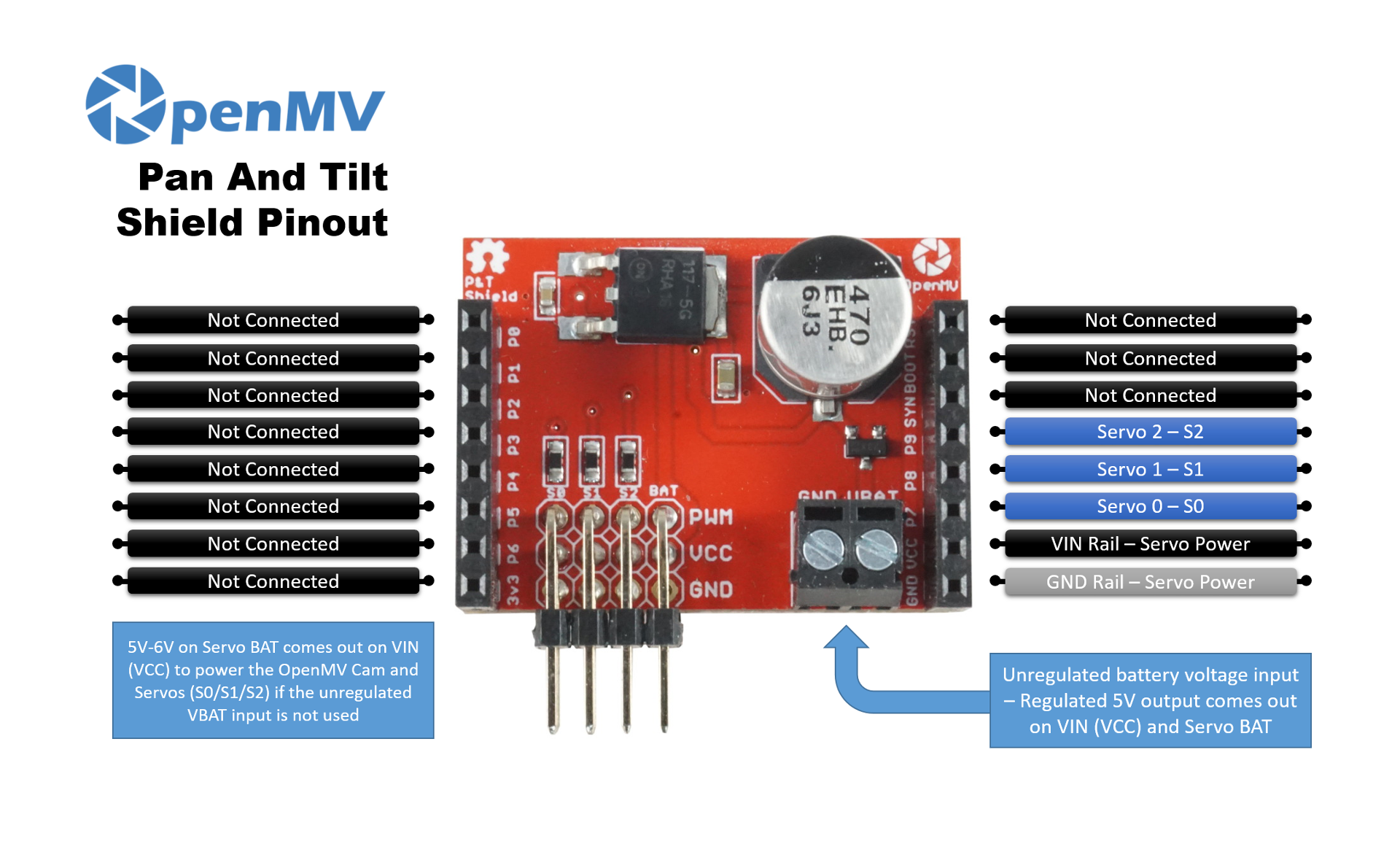
Riferimento dei pin¶
Pin |
Funzione |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
Ingresso a batteria 6.5–18 V sul morsetto a vite (limiti dell’NCP1117) |
VIN out |
5 V regolati dall’NCP1117 on-board — alimenta sia la camera sia la linea dei servo |
Linea GND |
Massa comune di servo e camera |
Utilizzo¶
Comanda i tre canali servo con PWM a 50 Hz. L’intervallo di larghezza dell’impulso varia tra i servo, quindi regola MIN_US e MAX_US per adattarli ai tuoi — i valori tipici sono intorno a 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)