Servo Shield¶
Il Servo Shield pilota fino a otto servocomandi hobbistici in parallelo dalla OpenMV Cam tramite I2C, usando un controller servo / PWM PCA9685.
Per il datasheet completo, le foto e l’acquisto consulta la pagina prodotto del Servo Shield.
Punti salienti¶
Controller servo / PWM PCA9685
Otto canali servo indipendenti tramite I2C
Impilabile con il Motor Shield e il Pan and Tilt Shield
Pinout¶
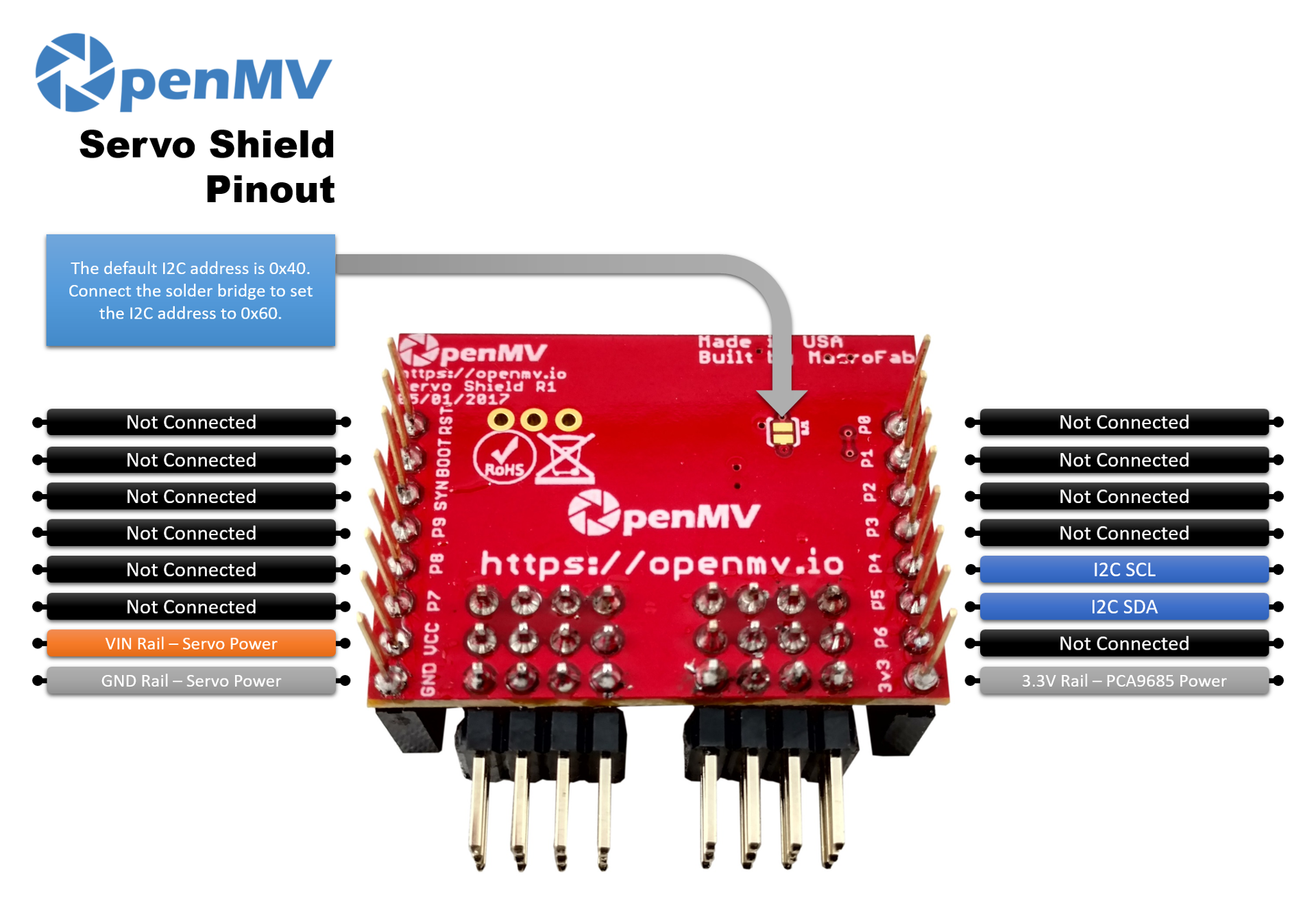
Riferimento dei pin¶
Pin |
Funzione |
|---|---|
P4 |
I²C SCL — clock verso il PCA9685 |
P5 |
I²C SDA — dati verso il PCA9685 |
Linea VIN |
Alimenta i servocomandi (dal pin VIN della camera) |
Linea 3.3V |
Alimenta la logica del PCA9685 |
Linea GND |
Massa comune tra servocomandi e camera |
L’indirizzo I²C predefinito è 0x40. Collega il ponticello a saldare integrato per spostare l’indirizzo a 0x60.
Nota
Lo shield preleva l’alimentazione dei servocomandi direttamente dal pin VIN della camera. Su nessuna OpenMV Cam l’USB alimenta VIN, quindi VIN deve essere fornito esternamente (batteria, alimentatore da banco o simili): scegli una sorgente dimensionata per la corrente di stallo combinata di tutti i servocomandi che intendi pilotare.
Utilizzo¶
Pilota gli otto canali servo tramite il PCA9685 su I²C. L’intervallo di larghezza dell’impulso varia tra i servocomandi, quindi regola MIN_US e MAX_US in base ai tuoi — i valori tipici sono intorno a 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
Il PCA9685 gestisce anche un PWM generico a 12 bit a qualsiasi frequenza — riutilizza la stessa classe con set_duty (0–4095) per, ad esempio, far dissolvere un LED sul canale 0 a 1 kHz. L’helper qui sotto scala un float 0,0–100,0% sull’intervallo di duty 0–4095 del chip:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)