Servo Shield¶
Servo Shield driver upp till åtta hobbyservon parallellt från OpenMV Cam över I2C, med hjälp av en PCA9685 servo-/PWM-styrkrets.
För fullständigt datablad, foton och beställning, se produktsidan för Servo Shield.
Höjdpunkter¶
PCA9685 servo-/PWM-styrkrets
Åtta oberoende servokanaler över I2C
Kan staplas med Motor Shield och Pan and Tilt Shield
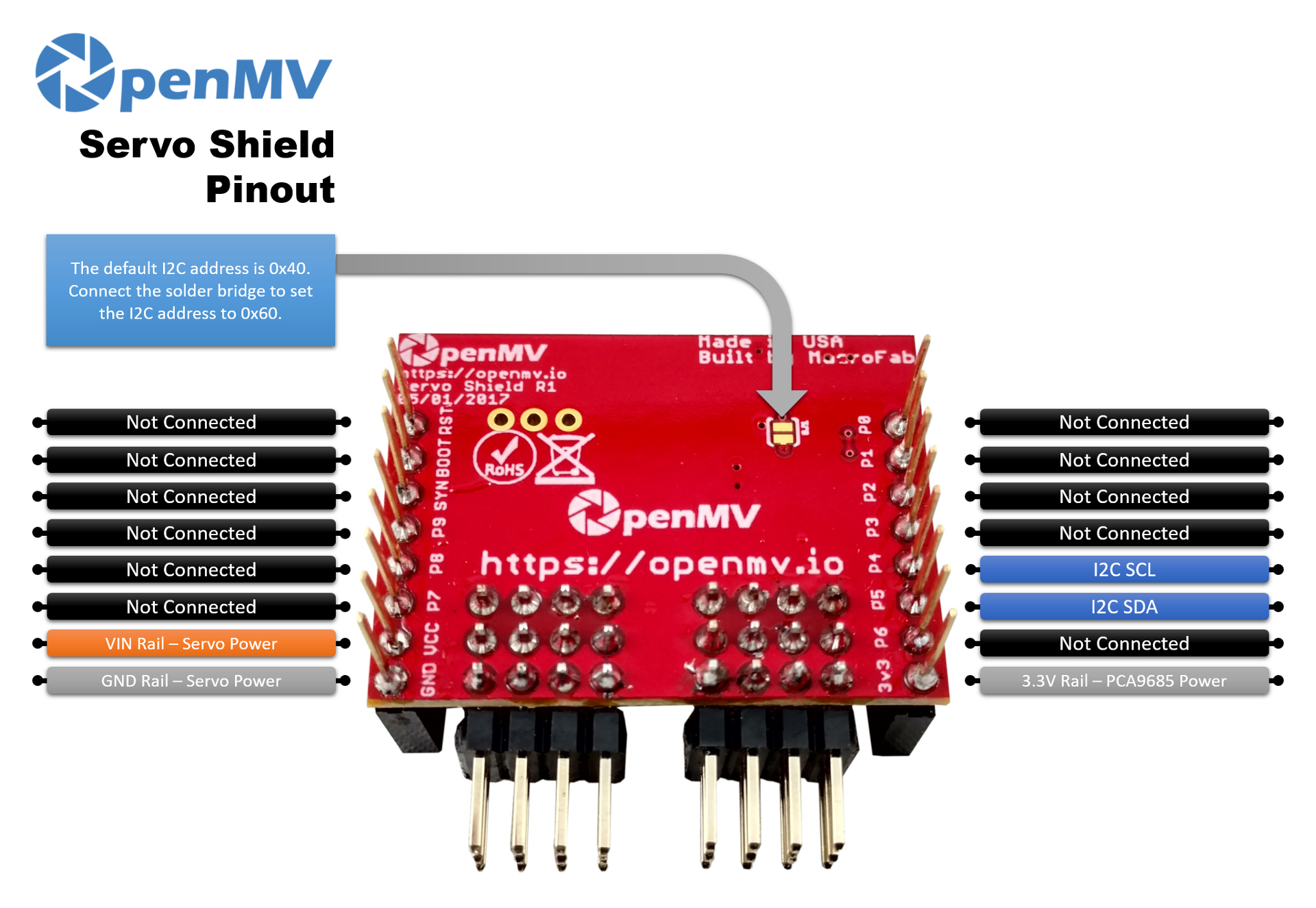
Stiftschema¶
Stiftreferens¶
Stift |
Funktion |
|---|---|
P4 |
I²C SCL — klocka till PCA9685 |
P5 |
I²C SDA — data till PCA9685 |
VIN-skena |
Driver servona (från kamerans VIN-stift) |
3,3 V-skena |
Driver PCA9685-logiken |
GND-skena |
Gemensam jord för servon och kamera |
Standard-I²C-adressen är 0x40. Anslut den inbyggda lödbygeln för att flytta adressen till 0x60.
Anteckning
Shieldet drar servoström direkt från kamerans VIN-stift. USB matar inte VIN på någon OpenMV Cam, så VIN måste tillföras externt (batteri, bänkaggregat eller liknande) — välj en källa som klarar den sammanlagda stallströmmen för varje servo du planerar att driva.
Användning¶
Driv de åtta servokanalerna genom PCA9685 över I²C. Pulsbreddsintervallet varierar mellan servon, så justera MIN_US och MAX_US för att matcha dina — typiska värden ligger runt 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 hanterar även allmän 12-bitars PWM med valfri frekvens — återanvänd samma klass med set_duty (0–4095) för att till exempel tona en LED på kanal 0 vid 1 kHz. Hjälpfunktionen nedan skalar ett flyttal på 0,0–100,0 % till chippets duty-intervall 0–4095:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)