Servo Shield¶
O Servo Shield aciona até oito servos de modelismo em paralelo a partir da OpenMV Cam via I2C, usando um controlador de servo / PWM PCA9685.
Para o datasheet completo, fotos e informações de compra, consulte a página do produto Servo Shield.
Destaques¶
Controlador de servo / PWM PCA9685
Oito canais de servo independentes via I2C
Empilha com o Motor Shield e o Pan and Tilt Shield
Pinagem¶
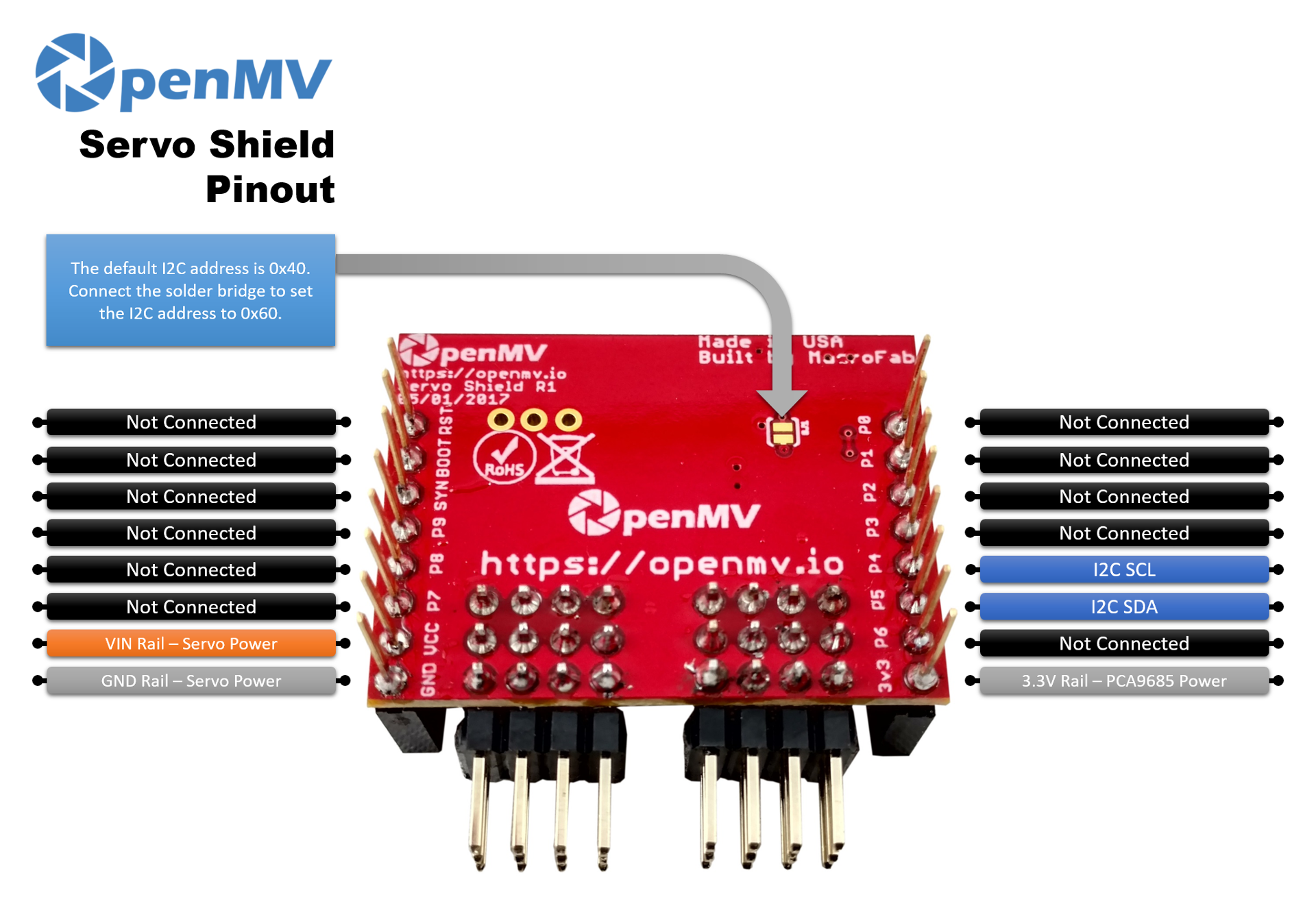
Referência de pinos¶
Pino |
Função |
|---|---|
P4 |
I²C SCL — clock para o PCA9685 |
P5 |
I²C SDA — dados para o PCA9685 |
Trilho VIN |
Alimenta os servos (a partir do pino VIN da câmera) |
Trilho 3.3V |
Alimenta a lógica do PCA9685 |
Trilho GND |
Terra comum do servo e da câmera |
O endereço I²C padrão é 0x40. Conecte a ponte de solda embarcada para mover o endereço para 0x60.
Nota
O shield consome a alimentação dos servos diretamente do pino VIN da câmera. O USB não alimenta o VIN em nenhuma OpenMV Cam, então o VIN deve ser fornecido externamente (bateria, fonte de bancada ou similar) — escolha uma fonte dimensionada para a corrente de bloqueio combinada de todos os servos que você planeja acionar.
Uso¶
Acione os oito canais de servo através do PCA9685 via I²C. A faixa de largura de pulso varia entre servos, então ajuste MIN_US e MAX_US para corresponder aos seus — valores típicos ficam em torno de 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
O PCA9685 também lida com PWM geral de 12 bits em qualquer frequência — reutilize a mesma classe com set_duty (0–4095) para, por exemplo, fazer um LED no canal 0 esmaecer a 1 kHz. O helper abaixo escala um valor float de 0,0–100,0% para a faixa de duty de 0–4095 do chip:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)