Servo Shield¶
Servo Shield acționează până la opt servomotoare hobby în paralel de la OpenMV Cam prin I2C, folosind un controler de servo / PWM PCA9685.
Pentru fișa tehnică completă, fotografii și comandă, consultați pagina de produs Servo Shield.
Caracteristici principale¶
Controler de servo / PWM PCA9685
Opt canale de servo independente prin I2C
Se stivuiește cu Motor Shield și Pan and Tilt Shield
Pinout¶
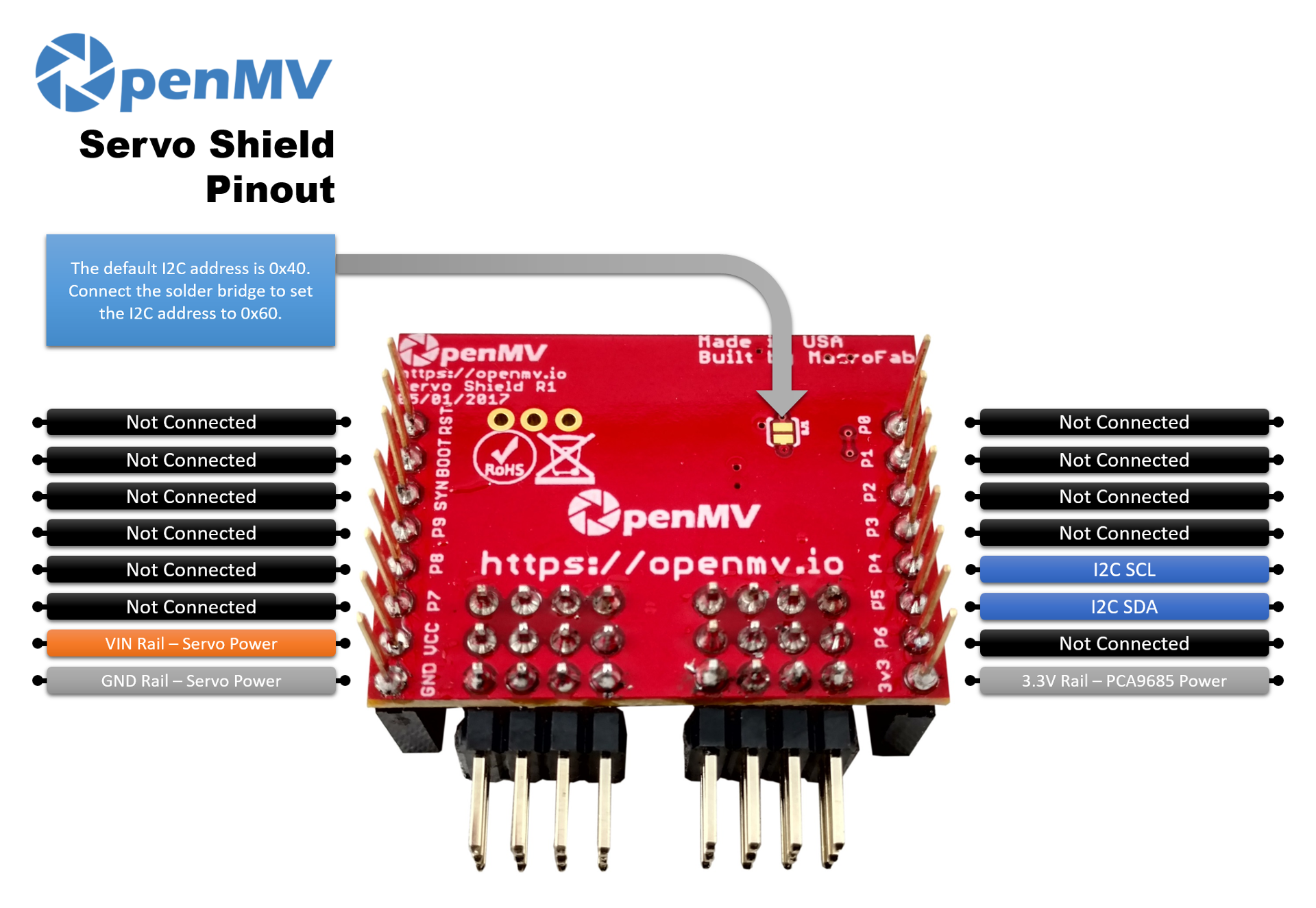
Referință pini¶
Pin |
Funcție |
|---|---|
P4 |
I²C SCL — ceas către PCA9685 |
P5 |
I²C SDA — date către PCA9685 |
Magistrală VIN |
Alimentează servomotoarele (de la pinul VIN al camerei) |
Magistrală 3,3 V |
Alimentează logica PCA9685 |
Magistrală GND |
Masă comună a servomotoarelor și camerei |
Adresa I²C implicită este 0x40. Conectați puntea de lipire integrată pentru a muta adresa la 0x60.
Notă
Shield-ul preia alimentarea servomotoarelor direct de la pinul VIN al camerei. USB nu alimentează VIN pe niciun OpenMV Cam, deci VIN trebuie furnizat extern (baterie, sursă de bancă sau similar) — alegeți o sursă dimensionată pentru curentul combinat de blocare al fiecărui servomotor pe care intenționați să îl acționați.
Utilizare¶
Acționați cele opt canale de servo prin PCA9685 prin I²C. Intervalul lățimii impulsului variază între servomotoare, așa că reglați MIN_US și MAX_US ca să se potrivească cu ale dvs. — valorile tipice sunt în jur de 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 gestionează de asemenea PWM general pe 12 biți la orice frecvență — reutilizați aceeași clasă cu set_duty (0–4095) pentru a, de exemplu, estompa un LED pe canalul 0 la 1 kHz. Funcția ajutătoare de mai jos scalează o valoare float de 0,0–100,0% pe intervalul de factor de umplere 0–4095 al cipului:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)