Servo Shield¶
Servo Shield ohjaa OpenMV Camista jopa kahdeksaa harraste-servoa rinnakkain I2C:n kautta PCA9685 servo-/PWM-ohjaimella.
Täydellinen datalehti, kuvat ja tilaustiedot löytyvät Servo Shield -tuotesivulta.
Kohokohdat¶
PCA9685 servo-/PWM-ohjain
Kahdeksan itsenäistä servokanavaa I2C:n kautta
Pinottavissa Motor Shieldin ja Pan and Tilt Shieldin kanssa
Nastajärjestys¶
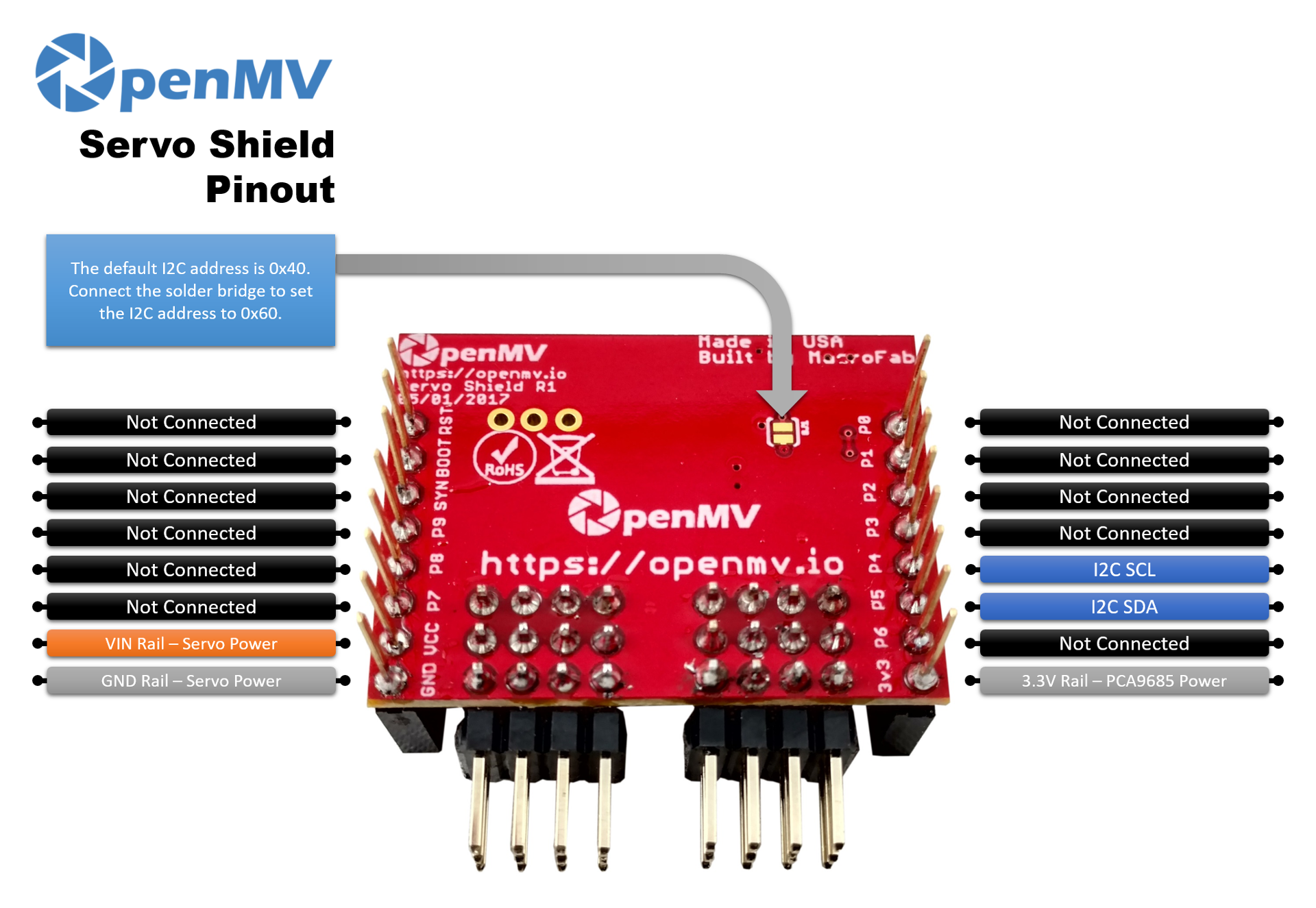
Nastaviite¶
Nasta |
Toiminto |
|---|---|
P4 |
I²C SCL — kello PCA9685:lle |
P5 |
I²C SDA — data PCA9685:lle |
VIN-kisko |
Syöttää virtaa servoille (kameran VIN-nastasta) |
3,3 V kisko |
Syöttää virtaa PCA9685-logiikalle |
GND-kisko |
Servon ja kameran yhteinen maa |
Oletus-I²C-osoite on 0x40. Kytke sisäänrakennettu juotossilta siirtääksesi osoitteen arvoon 0x60.
Muista
Shield ottaa servovirran suoraan kameran VIN-nastasta. USB ei syötä VIN:ää missään OpenMV Camissa, joten VIN on syötettävä ulkoisesti (akku, pöytävirtalähde tai vastaava) — valitse lähde, joka on mitoitettu kaikkien ohjattavien servojen yhteenlasketulle jumitusvirralle.
Käyttö¶
Ohjaa kahdeksaa servokanavaa PCA9685:n kautta I²C:llä. Pulssinleveysalue vaihtelee servojen välillä, joten viritä MIN_US ja MAX_US vastaamaan omiasi — tyypilliset arvot ovat noin 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 hoitaa myös yleisen 12-bittisen PWM:n millä tahansa taajuudella — käytä samaa luokkaa uudelleen set_duty (0–4095) -funktiolla esimerkiksi häivyttääksesi LEDiä kanavassa 0 taajuudella 1 kHz. Alla oleva apufunktio skaalaa 0.0–100.0 % liukuluvun sirun 0–4095 työsuhdealueelle:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)