Driver Shield¶
Driver Shield ohjaa kahta 3 A:n moottoria tai neljää erillistä 1,5 A:n linjaohjainta laajalla 6-36 V:n syöttöjännitteellä, mikä antaa OpenMV Cam -kameralle kestävän moottorinohjauksen etupään, jossa on käänteisjännite- ja ylijännitesuojaus.
Täydellisen datalehden, valokuvat ja tilaustiedot löydät Driver Shield -tuotesivulta.
Kohokohdat¶
Kaksi 3 A:n moottoriohjainta TAI neljä 1,5 A:n linjaohjainta, 6-36 V
Käänteisjännite- ja transienttiylijännitesuojaus tulossa
0-5 V:n ADC-tulo ±36 V:n ylijännitesuojauksella
0-5 V:n digitaalinen I/O kameran synkronointilaukaisimia varten, oikosulkusuojattu
Nastat¶
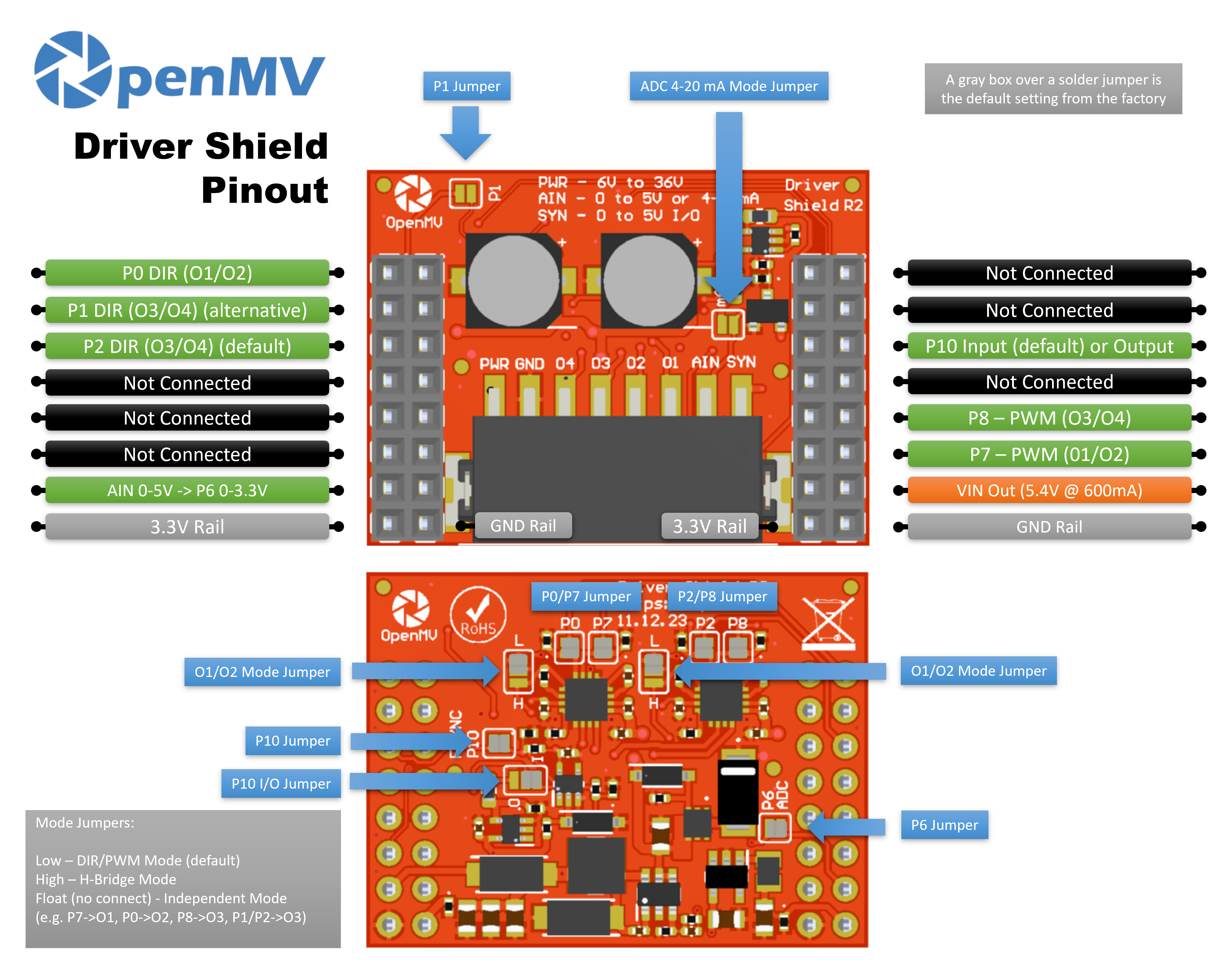
Nastaviite¶
Nasta |
Toiminto |
|---|---|
P0 |
DIR lähtöparille O1/O2 |
P1 |
DIR lähtöparille O3/O4 (vaihtoehtoinen) |
P2 |
DIR lähtöparille O3/O4 (oletus) |
P6 |
Tasonsiirretty AIN-takaisinluku (0–3,3 V nastassa P6) |
P7 |
PWM lähtöparille O1/O2 |
P8 |
PWM lähtöparille O3/O4 |
P10 |
SYN — avokollektorityyppinen digitaalinen I/O riviliittimessä |
PWR in |
6–36 V:n laaja tulo riviliittimessä (käänteisjännitettä sietävä) |
AIN in |
Analoginen tulo riviliittimessä |
VIN out |
5,4 V jopa 600 mA:n virralla kortin omasta säätimestä |
3,3 V:n kisko |
Syöttää suojuksen oman elektroniikan virran |
GND-kisko |
Yhteinen maa |
Muista
AIN on ylijännitesuojattu jopa ±36 V:iin ja toimii oletuksena 0–5 V:n jännitetulona, joka skaalataan alas 0–3,3 V:iin nastassa P6. Silloita suojuksen etupuolella oleva 4–20 mA -tilan shuntti vaihtaaksesi AIN:n 4–20 mA:n virtasilmukkatuloksi.
Muista
SYN on avokollektorityyppinen digitaalinen linja, joka on vedetty ylös 3,3 V:iin kameran puolella ja 5 V:iin SYN-liittimen puolella. Oletuksena se on tulo — suojus siirtää tason 0–5 V SYN:ssä alas 0–3,3 V:iin nastassa P10. Vaihda kortin juotoshyppyä kääntääksesi P10:n lähdöksi, jolloin taso 0–3,3 V nastassa P10 siirretään ylös 0–5 V:iin SYN:ssä.
Muista
Jokainen nasta P0, P1, P2, P6, P7, P8 ja P10 voidaan ottaa muuhun käyttöön. P0, P2, P6, P7, P8 ja P10 on oletuksena kytketty takapuolen juotoshyppyjen kautta — avaa minkä tahansa vapautettavan nastan hyppy. P1 on oletuksena irrotettu: silloita sen etupuolen hyppy ohjataksesi O3/O4:n DIR sen sijaan nastaan P1 (ja avaa P2:n takapuolen hyppy vapauttaaksesi P2:n).
Muista
Suojuksen takana on kaksi tilahyppyä — yksi kullekin H-sillalle — jotka asettavat itsenäisesti kunkin lähtöparin yhteen kolmesta tilasta. Jokaisessa hypyssä on L- ja H-merkinnät, jotka osoittavat, kumpi puoli valitsee minkäkin tilan:
Low (oletus) — DIR/PWM-tila: yksi DIR-nasta + yksi PWM-nasta per silta.
High — H-siltatila: molemmat nastat ohjaavat siltaa suoraan sirun kaksitulon totuustaulun kautta.
Float (ei kytkentää) — itsenäinen tila: kustakin nastasta tulee erillinen linjaohjain, joka on ohjattu yhteen lähtöön.
Jokainen DRV8876 on virtarajoitettu yhteensä 3 A:iin per siru — eli 3 A yhden sillan läpi (DIR/PWM- tai H-siltatila) tai 1,5 A per lähtö jaettuna kahden lähdön kesken (itsenäinen tila).
Käyttö¶
DIR/PWM-tila (oletus)¶
Ohjaa harjallista DC-moottoria lähtöparissa O1/O2 — aseta suunta nastassa P0 ja syötä PWM-nopeussignaali nastaan P7. Alla oleva silmukka nostaa pulssisuhteen täyteen nopeuteen ja takaisin alas, sitten kääntää suunnan ja toistaa:
from machine import Pin, PWM
import time
direction = Pin("P0", Pin.OUT)
speed = PWM(Pin("P7"), freq=20_000, duty_u16=0)
def ramp(target):
for duty in range(0, target, 1024):
speed.duty_u16(duty)
time.sleep_ms(10)
for duty in range(target, -1, -1024):
speed.duty_u16(duty)
time.sleep_ms(10)
while True:
direction.value(1) # forward
ramp(65_535)
direction.value(0) # reverse
ramp(65_535)
Kaksi H-siltaa voivat myös ohjata bipolaarista askelmoottoria — pidä molemmat PWM-kanavat täydellä ohjauksella ja askella DIR-nastat neljävaiheisen sekvenssin läpi:
from machine import Pin, PWM
import time
dir12 = Pin("P0", Pin.OUT)
dir34 = Pin("P2", Pin.OUT)
PWM(Pin("P7"), freq=20_000, duty_u16=65_535) # full drive on O1/O2
PWM(Pin("P8"), freq=20_000, duty_u16=65_535) # full drive on O3/O4
SEQUENCE = [(1, 1), (0, 1), (0, 0), (1, 0)]
def step(forward=True):
for a, b in SEQUENCE if forward else reversed(SEQUENCE):
dir12.value(a)
dir34.value(b)
time.sleep_ms(5)
while True:
for _ in range(50): # ~1 revolution forward (200 phases)
step()
for _ in range(50): # ~1 revolution backward
step(forward=False)
H-siltatila¶
Kun tilahyppy on asetettu asentoon high, molemmat sillan nastat ohjaavat H-siltaa suoraan. O1/O2:lle totuustaulu on:
(P0, P7) = (L, L)→ vapaakierto (lähdöt Hi-Z)(P0, P7) = (L, H)→ eteenpäin (O1 = H, O2 = L)(P0, P7) = (H, L)→ taaksepäin (O1 = L, O2 = H)(P0, P7) = (H, H)→ jarrutus (molemmat lähdöt matalalla)
(O3/O4 noudattaa samaa taulua nastoilla P1/P2 ja P8.) Alla oleva silmukka kierrättää moottorin tilojen eteenpäin → jarrutus → taaksepäin → vapaakierto kautta lähtöparissa O1/O2:
from machine import Pin
import time
p0 = Pin("P0", Pin.OUT)
p7 = Pin("P7", Pin.OUT)
def drive(a, b):
p0.value(a)
p7.value(b)
while True:
drive(0, 1) # forward
time.sleep(1)
drive(1, 1) # brake
time.sleep_ms(500)
drive(1, 0) # reverse
time.sleep(1)
drive(0, 0) # coast
time.sleep_ms(500)
Kumpikin nasta voidaan vaihtaa machine.PWM -kanavaksi suhteellista ohjausta varten — esim. (P0=0, P7=PWM) antaa eteenpäin/vapaakierron PWM-pulssisuhteella, (P0=1, P7=PWM) antaa taaksepäin/jarrutuksen suhteella (100 % − duty). Alla oleva silmukka nostaa pulssisuhdetta ja laskee sen takaisin, kun P0 pidetään arvossa 0 (eteenpäin/vapaakierto):
from machine import Pin, PWM
import time
p0 = Pin("P0", Pin.OUT, value=0)
p7 = PWM(Pin("P7"), freq=20_000, duty_u16=0)
while True:
for duty in range(0, 65_536, 1024):
p7.duty_u16(duty)
time.sleep_ms(10)
for duty in range(65_535, -1, -1024):
p7.duty_u16(duty)
time.sleep_ms(10)
Itsenäinen tila¶
Kun tilahyppy on kelluvana, kustakin nastasta tulee erillinen linjaohjain, joka on ohjattu yhteen lähtöön — hyödyllinen solenoideille, releille tai mille tahansa päälle/pois-kuormalle, joka ei tarvitse H-siltaa. Kytkentä on P7 → O1, P0 → O2, P8 → O3 ja P1 (tai P2) → O4:
from machine import Pin
import time
outputs = [
Pin("P7", Pin.OUT), # O1
Pin("P0", Pin.OUT), # O2
Pin("P8", Pin.OUT), # O3
Pin("P2", Pin.OUT), # O4
]
while True:
for o in outputs: # walk a single high pulse across O1–O4
o.value(1)
time.sleep_ms(200)
o.value(0)
Mitä tahansa neljästä nastasta voidaan myös PWM-ohjata machine.PWM -kanavan kautta suhteellista ohjausta varten — esimerkiksi häivytä kukin lähtö vuorollaan ylös ja alas:
from machine import Pin, PWM
import time
outputs = [
PWM(Pin("P7"), freq=1_000, duty_u16=0), # O1
PWM(Pin("P0"), freq=1_000, duty_u16=0), # O2
PWM(Pin("P8"), freq=1_000, duty_u16=0), # O3
PWM(Pin("P2"), freq=1_000, duty_u16=0), # O4
]
while True:
for o in outputs:
for duty in range(0, 65_536, 1024):
o.duty_u16(duty)
time.sleep_ms(5)
for duty in range(65_535, -1, -1024):
o.duty_u16(duty)
time.sleep_ms(5)
Muu I/O¶
Lue AIN-riviliittimen tulo tasonsiirretyn P6-nastan kautta:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reagoi laskevaan reunaan SYN-linjalla — esimerkiksi synkronoidaksesi kameran toisen laitteen kanssa, joka vetää SYN:n alas:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)