Driver Shield¶
Driver Shield pokreće dva motora od 3 A ili četiri neovisna linijska upravljača od 1.5 A iz širokog napajanja od 6-36 V, dajući OpenMV Cam robustno čelo za upravljanje motorima sa zaštitom od obrnutog napona i naponskih udara.
Za potpunu tehničku dokumentaciju, fotografije i naručivanje pogledajte stranicu proizvoda Driver Shield.
Istaknute značajke¶
Dva upravljača motora od 3 A ILI četiri linijska upravljača od 1.5 A, 6-36 V
Zaštita od obrnutog napona i prijelaznih naponskih udara na ulazu
ADC ulaz 0-5 V sa zaštitom od prenapona od ±36 V
Digitalni I/O od 0-5 V za okidače sinkronizacije kamere, zaštićen od kratkog spoja
Raspored pinova¶
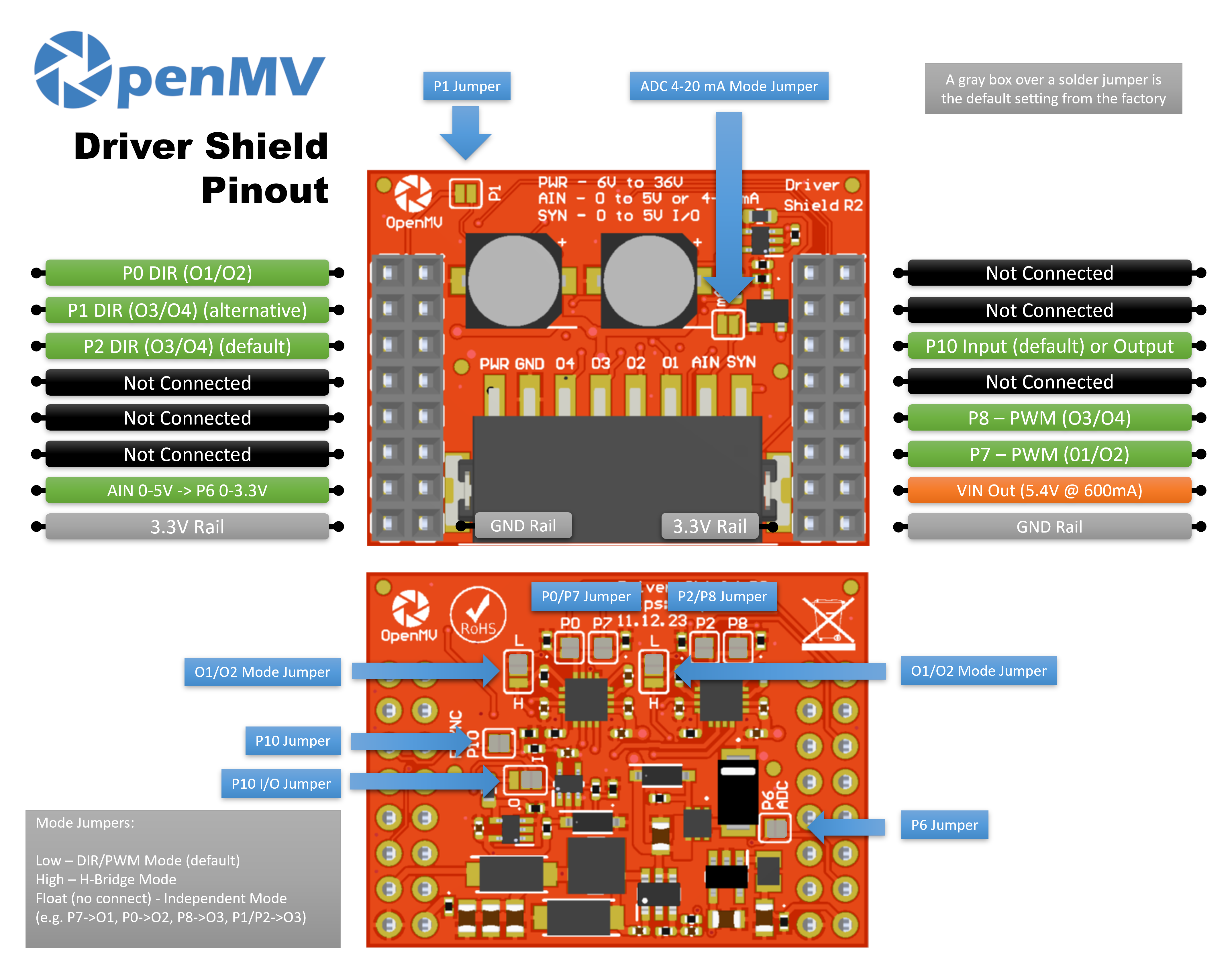
Referenca pinova¶
Pin |
Funkcija |
|---|---|
P0 |
DIR za izlazni par O1/O2 |
P1 |
DIR za izlazni par O3/O4 (alternativno) |
P2 |
DIR za izlazni par O3/O4 (zadano) |
P6 |
Naponski prilagođeno očitanje AIN-a (0–3.3 V na P6) |
P7 |
PWM za izlazni par O1/O2 |
P8 |
PWM za izlazni par O3/O4 |
P10 |
SYN — digitalni I/O otvorenog odvoda na priključnoj letvici |
PWR ulaz |
Široki ulaz 6–36 V na priključnoj letvici (otporan na obrnuti napon) |
AIN ulaz |
Analogni ulaz na priključnoj letvici |
VIN izlaz |
5.4 V do 600 mA iz ugrađenog regulatora |
Vod 3.3V |
Napaja ugrađenu elektroniku shielda |
Vod GND |
Zajednička masa |
Napomena
AIN je zaštićen od prenapona do ±36 V i zadano je naponski ulaz 0–5 V, smanjen na 0–3.3 V na P6. Premostite shunt za način rada 4–20 mA na prednjoj strani shielda kako biste prebacili AIN na strujni ulaz 4–20 mA.
Napomena
SYN je digitalni vod otvorenog odvoda, podignut na 3.3 V na strani kamere i 5 V na strani SYN priključka. Zadano je ulaz — shield naponski prilagođava 0–5 V na SYN na 0–3.3 V na P10. Promijenite ugrađeni lemljeni premosnik kako biste P10 prebacili u izlaz, naponski prilagođavajući 0–3.3 V na P10 na 0–5 V na SYN.
Napomena
Svaki od pinova P0, P1, P2, P6, P7, P8 i P10 može se preuzeti za nepovezanu uporabu. P0, P2, P6, P7, P8 i P10 su zadano spojeni preko lemljenih premosnika na stražnjoj strani — otvorite premosnik na bilo kojem pinu koji želite osloboditi. P1 je zadano odspojen: premostite njegov premosnik na prednjoj strani kako biste DIR za O3/O4 umjesto toga preusmjerili na P1 (i otvorite stražnji premosnik P2 kako biste oslobodili P2).
Napomena
Dva premosnika načina rada na stražnjoj strani shielda — po jedan za svaki H-most — neovisno postavljaju svaki izlazni par u jedan od tri načina rada. Svaki premosnik ima oznake L i H koje pokazuju koja strana odabire koje stanje:
Low (zadano) — DIR/PWM način rada: jedan DIR pin + jedan PWM pin po mostu.
High — H-most način rada: oba pina izravno pokreću most preko dvoulazne istinosne tablice čipa.
Float (bez spoja) — neovisni način rada: svaki pin postaje samostalni linijski upravljač usmjeren na jedan izlaz.
Svaki DRV8876 je strujno ograničen na ukupno 3 A po čipu — to je 3 A kroz jedan most (DIR/PWM ili H-most način rada) ili 1.5 A po izlazu raspodijeljeno na dva izlaza (neovisni način rada).
Uporaba¶
DIR/PWM način rada (zadano)¶
Pokrenite četkasti DC motor na izlaznom paru O1/O2 — postavite smjer na P0 i primijenite PWM signal brzine na P7. Petlja u nastavku povećava radni ciklus do pune brzine i ponovno ga smanjuje, zatim mijenja smjer i ponavlja:
from machine import Pin, PWM
import time
direction = Pin("P0", Pin.OUT)
speed = PWM(Pin("P7"), freq=20_000, duty_u16=0)
def ramp(target):
for duty in range(0, target, 1024):
speed.duty_u16(duty)
time.sleep_ms(10)
for duty in range(target, -1, -1024):
speed.duty_u16(duty)
time.sleep_ms(10)
while True:
direction.value(1) # forward
ramp(65_535)
direction.value(0) # reverse
ramp(65_535)
Dva H-mosta mogu također pokretati bipolarni koračni motor — držite oba PWM kanala na punom pogonu i koračajte DIR pinovima kroz četverofaznu sekvencu:
from machine import Pin, PWM
import time
dir12 = Pin("P0", Pin.OUT)
dir34 = Pin("P2", Pin.OUT)
PWM(Pin("P7"), freq=20_000, duty_u16=65_535) # full drive on O1/O2
PWM(Pin("P8"), freq=20_000, duty_u16=65_535) # full drive on O3/O4
SEQUENCE = [(1, 1), (0, 1), (0, 0), (1, 0)]
def step(forward=True):
for a, b in SEQUENCE if forward else reversed(SEQUENCE):
dir12.value(a)
dir34.value(b)
time.sleep_ms(5)
while True:
for _ in range(50): # ~1 revolution forward (200 phases)
step()
for _ in range(50): # ~1 revolution backward
step(forward=False)
H-most način rada¶
Kada je premosnik načina rada postavljen na high, oba pina mosta izravno pokreću H-most. Za O1/O2 istinosna tablica je:
(P0, P7) = (L, L)→ slobodni hod (izlazi Hi-Z)(P0, P7) = (L, H)→ naprijed (O1 = H, O2 = L)(P0, P7) = (H, L)→ unatrag (O1 = L, O2 = H)(P0, P7) = (H, H)→ kočenje (oba izlaza niska)
(O3/O4 slijedi istu tablicu s P1/P2 i P8.) Petlja u nastavku prolazi motor kroz naprijed → kočenje → unatrag → slobodni hod na izlaznom paru O1/O2:
from machine import Pin
import time
p0 = Pin("P0", Pin.OUT)
p7 = Pin("P7", Pin.OUT)
def drive(a, b):
p0.value(a)
p7.value(b)
while True:
drive(0, 1) # forward
time.sleep(1)
drive(1, 1) # brake
time.sleep_ms(500)
drive(1, 0) # reverse
time.sleep(1)
drive(0, 0) # coast
time.sleep_ms(500)
Bilo koji pin može se zamijeniti za machine.PWM kanal za proporcionalni pogon — npr. (P0=0, P7=PWM) daje naprijed/slobodni hod pri PWM radnom ciklusu, (P0=1, P7=PWM) daje unatrag/kočenje pri (100 % − duty). Petlja u nastavku povećava i smanjuje radni ciklus s P0 zadržanim na 0 (naprijed/slobodni hod):
from machine import Pin, PWM
import time
p0 = Pin("P0", Pin.OUT, value=0)
p7 = PWM(Pin("P7"), freq=20_000, duty_u16=0)
while True:
for duty in range(0, 65_536, 1024):
p7.duty_u16(duty)
time.sleep_ms(10)
for duty in range(65_535, -1, -1024):
p7.duty_u16(duty)
time.sleep_ms(10)
Neovisni način rada¶
Kada je premosnik načina rada u plutajućem stanju, svaki pin postaje samostalni linijski upravljač usmjeren na jedan izlaz — korisno za solenoide, releje ili bilo koje uključi/isključi opterećenje koje ne treba H-most. Mapiranje je P7 → O1, P0 → O2, P8 → O3 i P1 (ili P2) → O4:
from machine import Pin
import time
outputs = [
Pin("P7", Pin.OUT), # O1
Pin("P0", Pin.OUT), # O2
Pin("P8", Pin.OUT), # O3
Pin("P2", Pin.OUT), # O4
]
while True:
for o in outputs: # walk a single high pulse across O1–O4
o.value(1)
time.sleep_ms(200)
o.value(0)
Bilo koji od četiri pina također se može PWM-irati preko machine.PWM za proporcionalni pogon — na primjer, redom postupno pojačavajte i smanjujte svaki izlaz:
from machine import Pin, PWM
import time
outputs = [
PWM(Pin("P7"), freq=1_000, duty_u16=0), # O1
PWM(Pin("P0"), freq=1_000, duty_u16=0), # O2
PWM(Pin("P8"), freq=1_000, duty_u16=0), # O3
PWM(Pin("P2"), freq=1_000, duty_u16=0), # O4
]
while True:
for o in outputs:
for duty in range(0, 65_536, 1024):
o.duty_u16(duty)
time.sleep_ms(5)
for duty in range(65_535, -1, -1024):
o.duty_u16(duty)
time.sleep_ms(5)
Ostali I/O¶
Očitajte ulaz priključne letvice AIN preko naponski prilagođenog pina P6:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reagirajte na silazni brid na SYN vodu — na primjer, za sinkronizaciju kamere s drugim uređajem koji spušta SYN na nisko:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)