Pan and Tilt Shield¶
Pan and Tilt Shield daje OpenMV Cam tri servo kanala s NCP1117 5 V linearnim regulatorom koji napaja i kameru i servo motore iz jednog baterijskog ulaza od 6.5–18 V.

Za potpunu tehničku dokumentaciju, fotografije i naručivanje pogledajte stranicu proizvoda Pan and Tilt Shield.
Istaknute značajke¶
Tri neovisna servo kanala
Slaže se sa Servo Shield-om
Raspored pinova¶
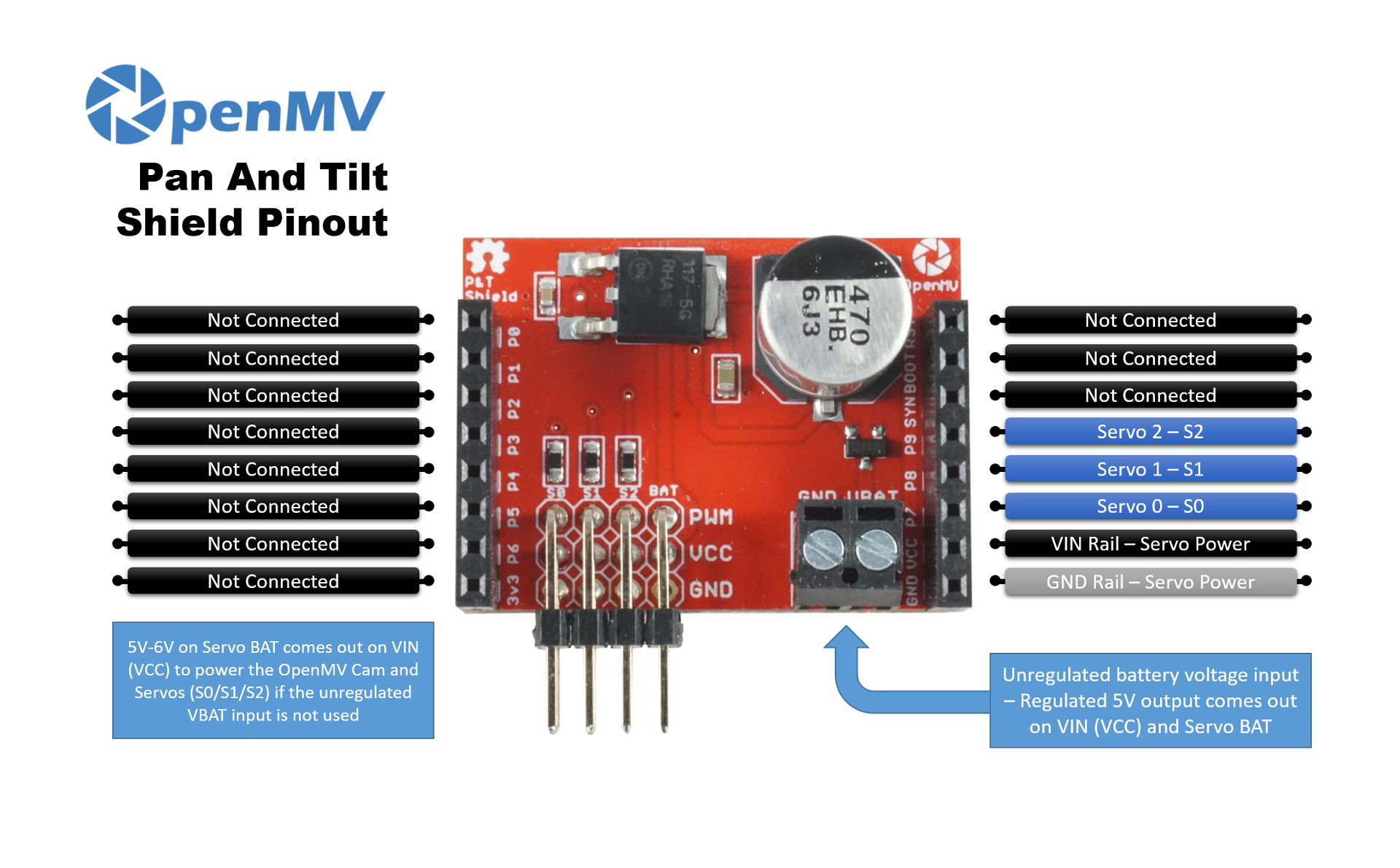
Referenca pinova¶
Pin |
Funkcija |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT ulaz |
Baterijski ulaz 6.5–18 V na vijčanom priključku (ograničenja NCP1117) |
VIN izlaz |
5 V regulirano iz ugrađenog NCP1117 — napaja i kameru i servo vod |
Vod GND |
Zajednička masa servo motora i kamere |
Uporaba¶
Pokrenite tri servo kanala s 50 Hz PWM-om. Raspon širine impulsa varira između servo motora, pa podesite MIN_US i MAX_US da odgovaraju vašima — tipične vrijednosti su oko 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)