Pan and Tilt Shield¶
Le Pan and Tilt Shield dote l’OpenMV Cam de trois canaux servo avec un régulateur linéaire NCP1117 5 V qui alimente à la fois la caméra et les servos depuis une seule entrée batterie de 6,5 à 18 V.

Pour la fiche technique complète, les photos et la commande, consultez la page produit du Pan and Tilt Shield.
Points forts¶
Trois canaux servo indépendants
Empilable avec le Servo Shield
Brochage¶
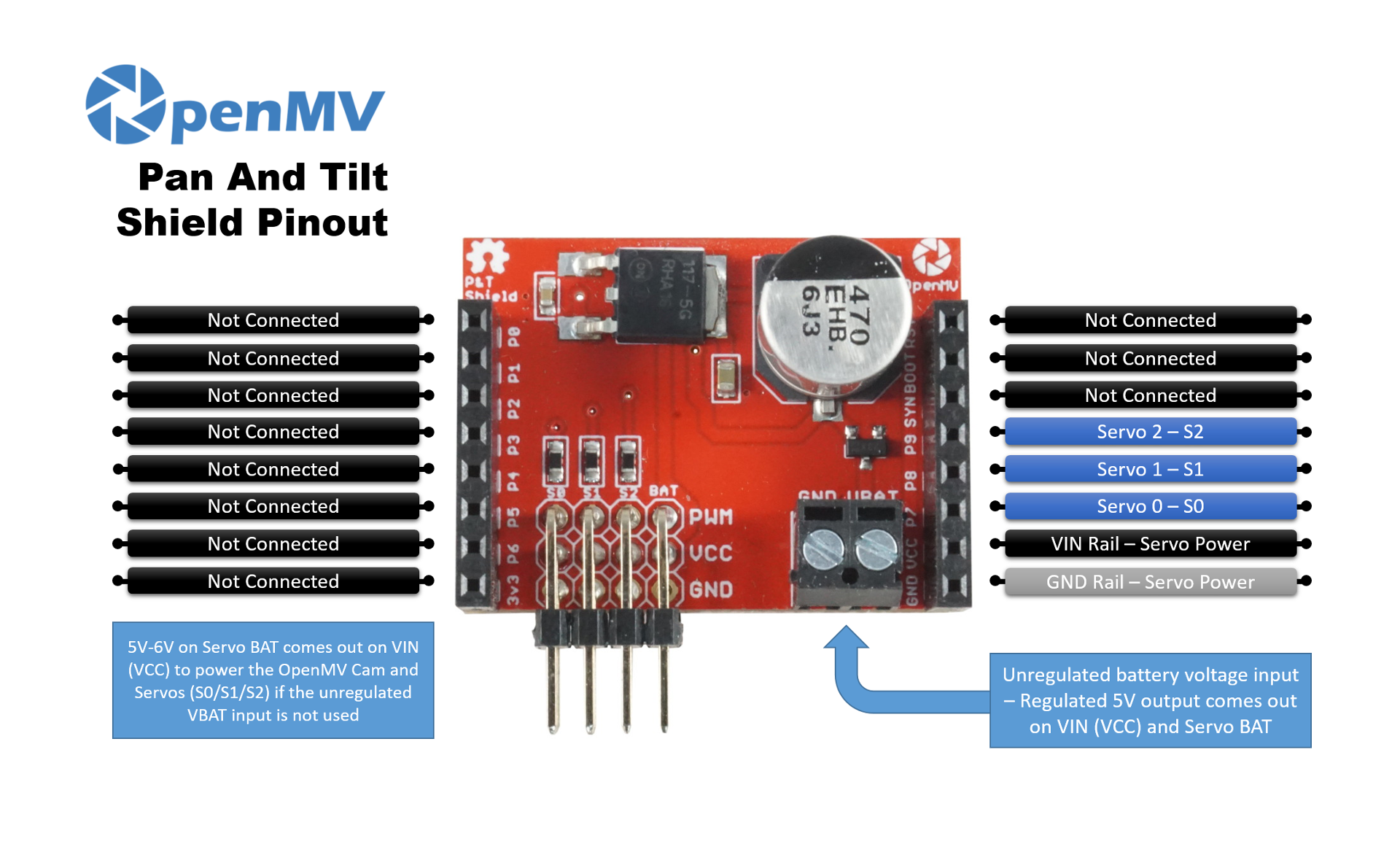
Référence des broches¶
Broche |
Fonction |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
Entrée batterie de 6,5 à 18 V sur le bornier à vis (limites du NCP1117) |
VIN out |
5 V régulés depuis le NCP1117 intégré — alimente à la fois la caméra et le rail servo |
Rail GND |
Masse commune des servos et de la caméra |
Utilisation¶
Pilotez les trois canaux servo avec un PWM à 50 Hz. La plage de largeur d’impulsion varie selon les servos ; ajustez donc MIN_US et MAX_US pour correspondre aux vôtres — les valeurs typiques sont d’environ 1000 à 2000 µs
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)