Pan and Tilt Shield¶
Pan and Tilt Shield ger OpenMV Cam tre servokanaler med en NCP1117 5 V linjär regulator som försörjer både kameran och servona från en enda 6,5–18 V batteriingång.

För fullständigt datablad, foton och beställning, se produktsidan för Pan and Tilt Shield.
Höjdpunkter¶
Tre oberoende servokanaler
Staplas med Servo Shield
Stiftutgång¶
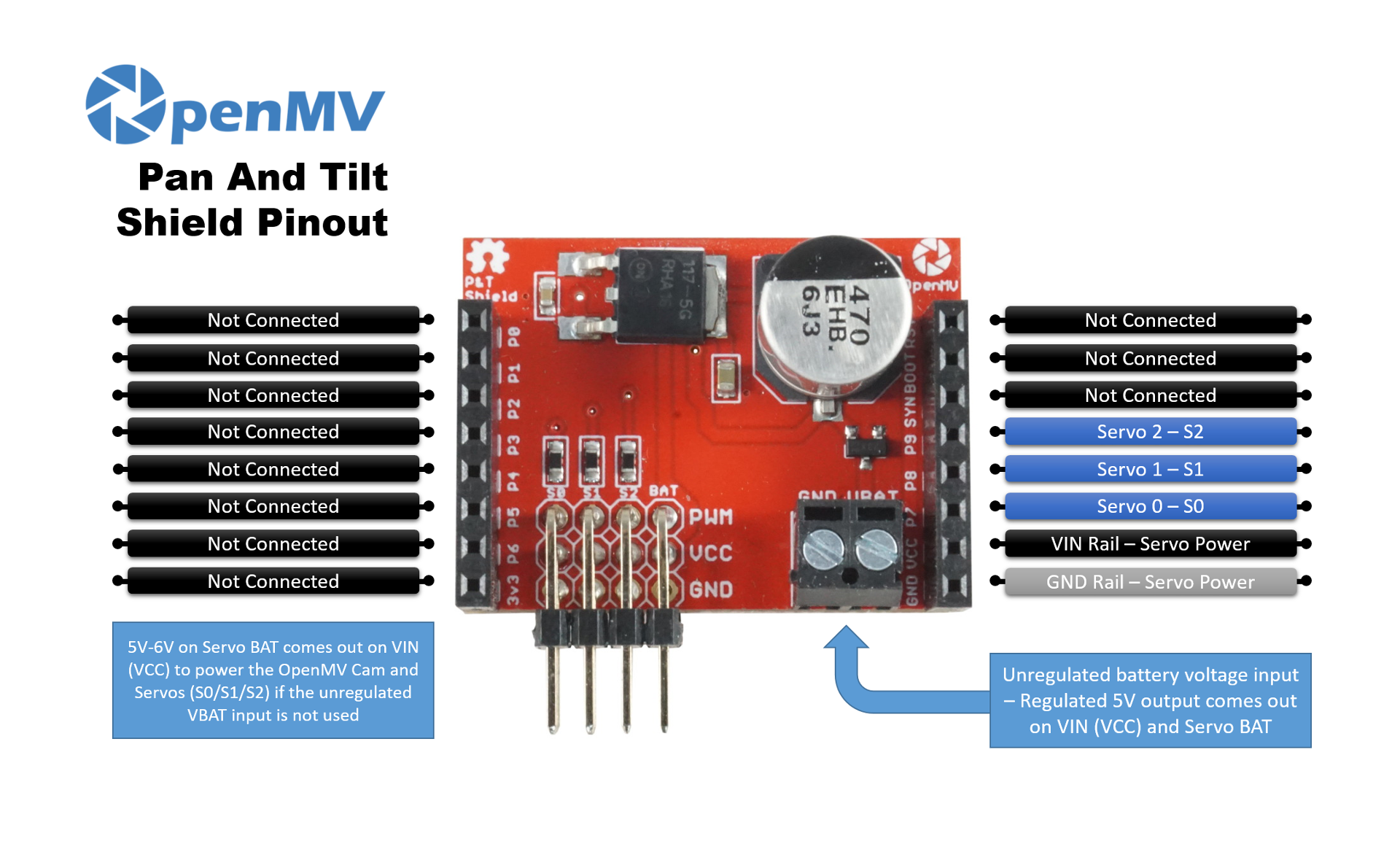
Stiftreferens¶
Stift |
Funktion |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
6,5–18 V batteriingång på skruvplinten (NCP1117-gränser) |
VIN ut |
5 V reglerat från den inbyggda NCP1117 — försörjer både kameran och servoskenan |
GND-skena |
Gemensam jord för servo och kamera |
Användning¶
Driv de tre servokanalerna med 50 Hz PWM. Pulsbreddsintervallet varierar mellan servon, så justera MIN_US och MAX_US för att matcha dina — typiska värden ligger runt 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)