云台扩展板(Pan and Tilt Shield)¶
云台扩展板为 OpenMV Cam 提供三个舵机通道,并带有 NCP1117 5 V 线性稳压器,可从单个 6.5–18 V 电池输入同时为摄像头和舵机供电。

完整的数据手册、照片和订购信息请参见 云台扩展板产品页面。
亮点¶
三个独立的舵机通道
可与舵机扩展板堆叠
引脚分布¶
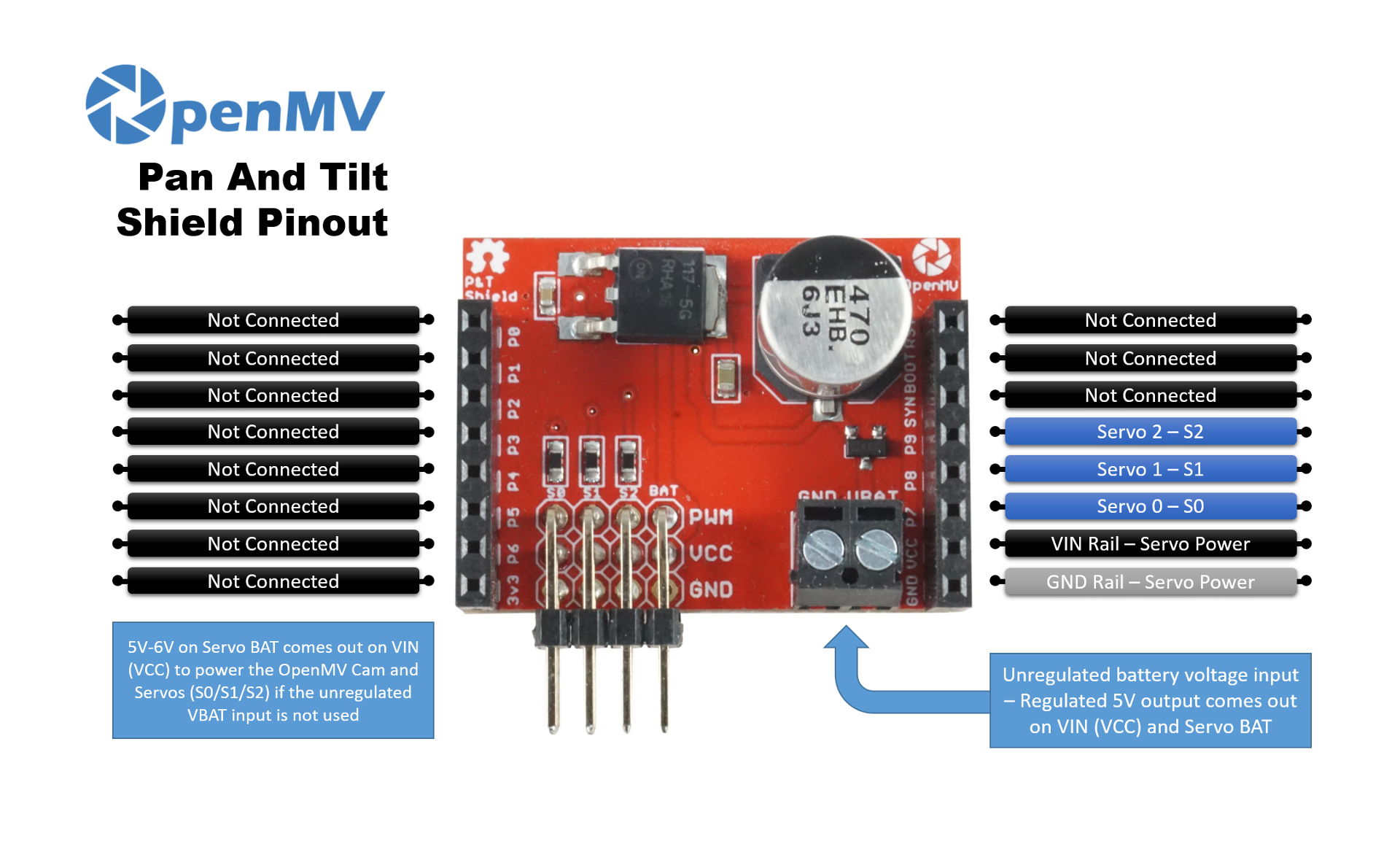
引脚参考¶
引脚 |
功能 |
|---|---|
P7 |
舵机 0(S0) |
P8 |
舵机 1(S1) |
P9 |
舵机 2(S2) |
VBAT in |
螺钉端子上的 6.5–18 V 电池输入(受 NCP1117 限制) |
VIN out |
由板载 NCP1117 稳压输出 5 V — 同时为摄像头和舵机电源轨供电 |
GND rail |
舵机与摄像头公共地 |
用法¶
用 50 Hz PWM 驱动三个舵机通道。脉宽范围因舵机而异,因此请调整 MIN_US 和 MAX_US 以匹配你的舵机 — 典型值约为 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)