舵机扩展板¶
舵机扩展板(v3)可直接由 OpenMV Cam 驱动多达四个标准业余舵机。其板载稳压器接受接线端子上的 6–36 V 输入,并输出 5.6 V、最高 5 A——足以用单一电源同时为摄像头和舵机供电。
完整数据手册、照片以及订购信息请参见 舵机扩展板产品页面。
亮点¶
通过 P7 / P8 / P9 / P10 驱动多达四个业余舵机
接线端子上的 6–36 V 输入(具有反向电压容差)
VIN 上提供 5.6 V、最高 5 A——为摄像头和舵机供电
0–5 V ADC 输入,具有最高 ±36 V 的过压保护
双向 0–5 V 数字 I/O,具有 3.3 V 到 5 V 的电平转换
引脚分布¶
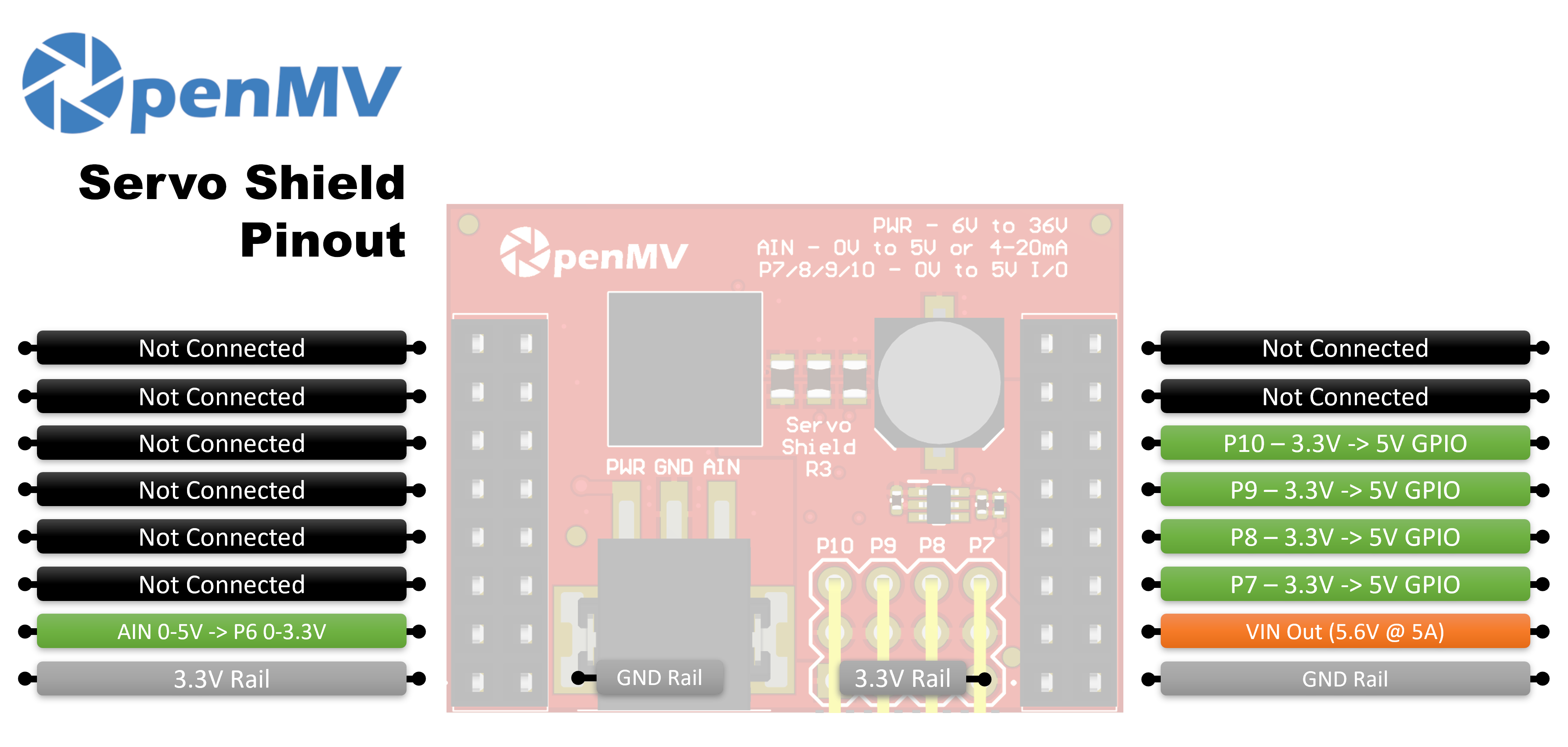
引脚参考¶
引脚 |
功能 |
|---|---|
P6 |
电平转换后的 AIN 回读(P6 上为 0–3.3 V) |
P7 |
舵机 1——双向 3.3 V ↔ 5 V GPIO |
P8 |
舵机 2——双向 3.3 V ↔ 5 V GPIO |
P9 |
舵机 3——双向 3.3 V ↔ 5 V GPIO |
P10 |
舵机 4——双向 3.3 V ↔ 5 V GPIO |
PWR 输入 |
接线端子上的 6–36 V 宽输入(具有反向电压容差) |
AIN 输入 |
接线端子上的模拟输入 |
VIN 输出 |
5.6 V 稳压输出,舵机和摄像头合计最高 5 A |
3.3V 电源轨 |
为扩展板的板载电路供电 |
GND 电源轨 |
公共接地 |
备注
AIN 具有最高 ±36 V 的过压保护,默认为 0–5 V 电压输入,缩放到 P6 上的 0–3.3 V。短接扩展板背面的 4–20 mA 模式分流跳线,可将 AIN 切换为 4–20 mA 电流环输入。
备注
P6–P10 中的每一个都通过扩展板背面的一个 0 欧姆电阻连接到摄像头。移除你想重新用作无关用途的任意引脚上的电阻即可。
备注
在该扩展板的 v2 版本上,P6–P9 是单向 3.3 V → 5 V 电平转换器(仅输出)。P10 是一条开漏数字信号线,摄像头一侧上拉到 3.3 V,舵机引脚一侧上拉到 5 V。默认情况下它是输入——扩展板将舵机引脚上的 0–5 V 电平转换到 P10 上的 0–3.3 V。更改板载焊接跳线可将 P10 翻转为输出,把 P10 上的 0–3.3 V 电平转换到舵机引脚上的 0–5 V。
用法¶
用 50 Hz 的 PWM 信号从 P7–P10 中的任一引脚驱动业余舵机。脉宽范围因舵机而异,因此请调整 MIN_US 和 MAX_US 以匹配你的舵机——典型值大约在 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
servo = PWM(Pin("P7"), freq=50)
def angle(deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(0)
time.sleep(1)
angle(90)
time.sleep(1)
angle(180)
time.sleep(1)
读取 AIN 接线端子输入(电平转换后的结果会出现在 P6 上):
from machine import ADC
import time
ain = ADC("P6")
while True:
# 0–5 V on the AIN terminal scaled to 0–3.3 V on P6
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)