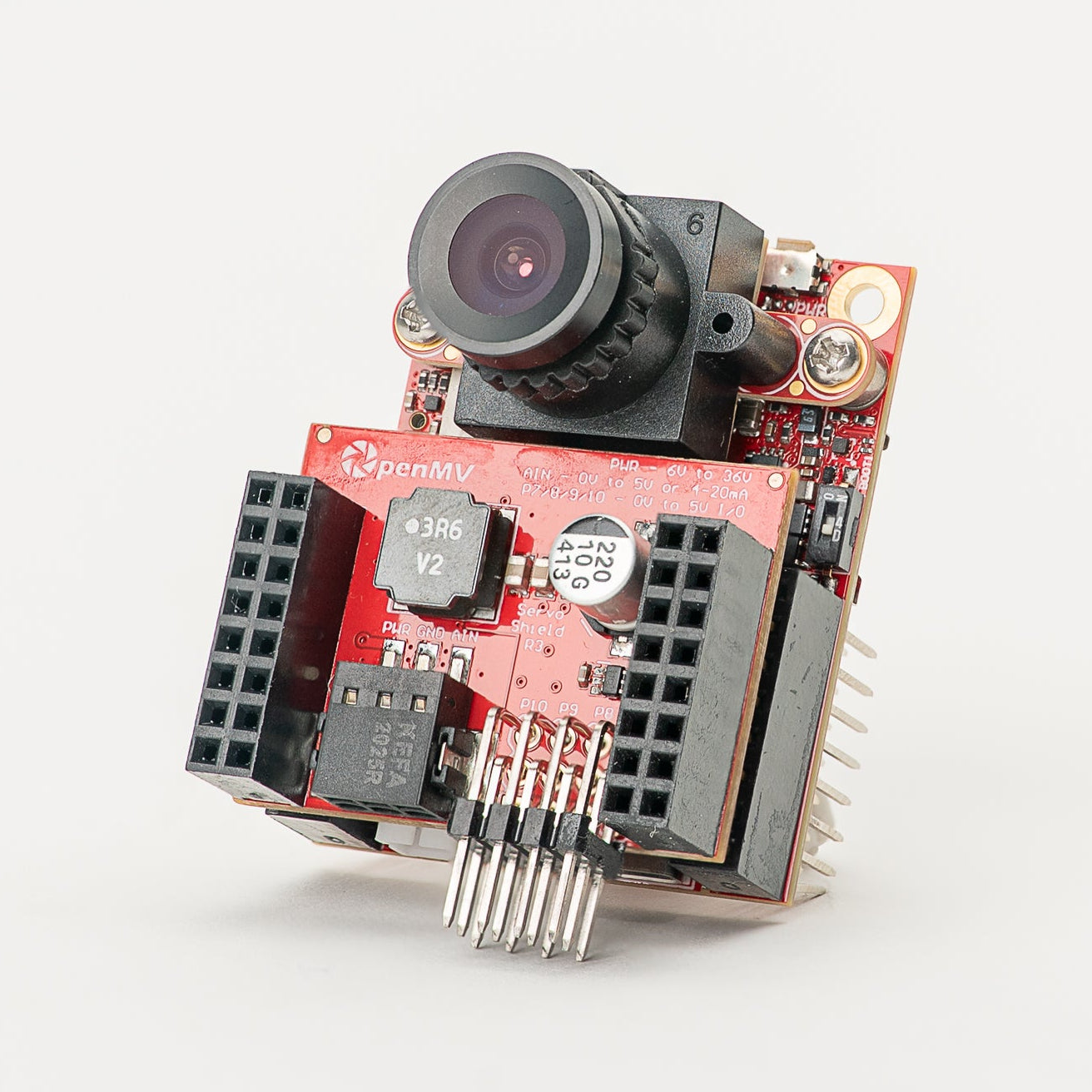
Servo Shield¶
Servo Shield (v3) upravlja s do četiri standardna hobi servo motora izravno s OpenMV kamere. Njegov ugrađeni regulator prihvaća 6–36 V ulaz na priključnoj letvici i isporučuje 5,6 V pri do 5 A — dovoljno za napajanje i kamere i servo motora iz jednog izvora.
Za potpuni podatkovni list, fotografije i naručivanje pogledajte stranicu proizvoda Servo Shield.
Istaknute značajke¶
Upravljajte s do četiri hobi servo motora preko P7 / P8 / P9 / P10
6–36 V ulaz na priključnoj letvici (toleratan na obrnuti napon)
5,6 V pri do 5 A na VIN — napaja kameru i servo motore
0–5 V ADC ulaz sa zaštitom od prenapona do ±36 V
Dvosmjerni 0–5 V digitalni I/O s naponskom prilagodbom 3,3 V na 5 V
Raspored pinova¶
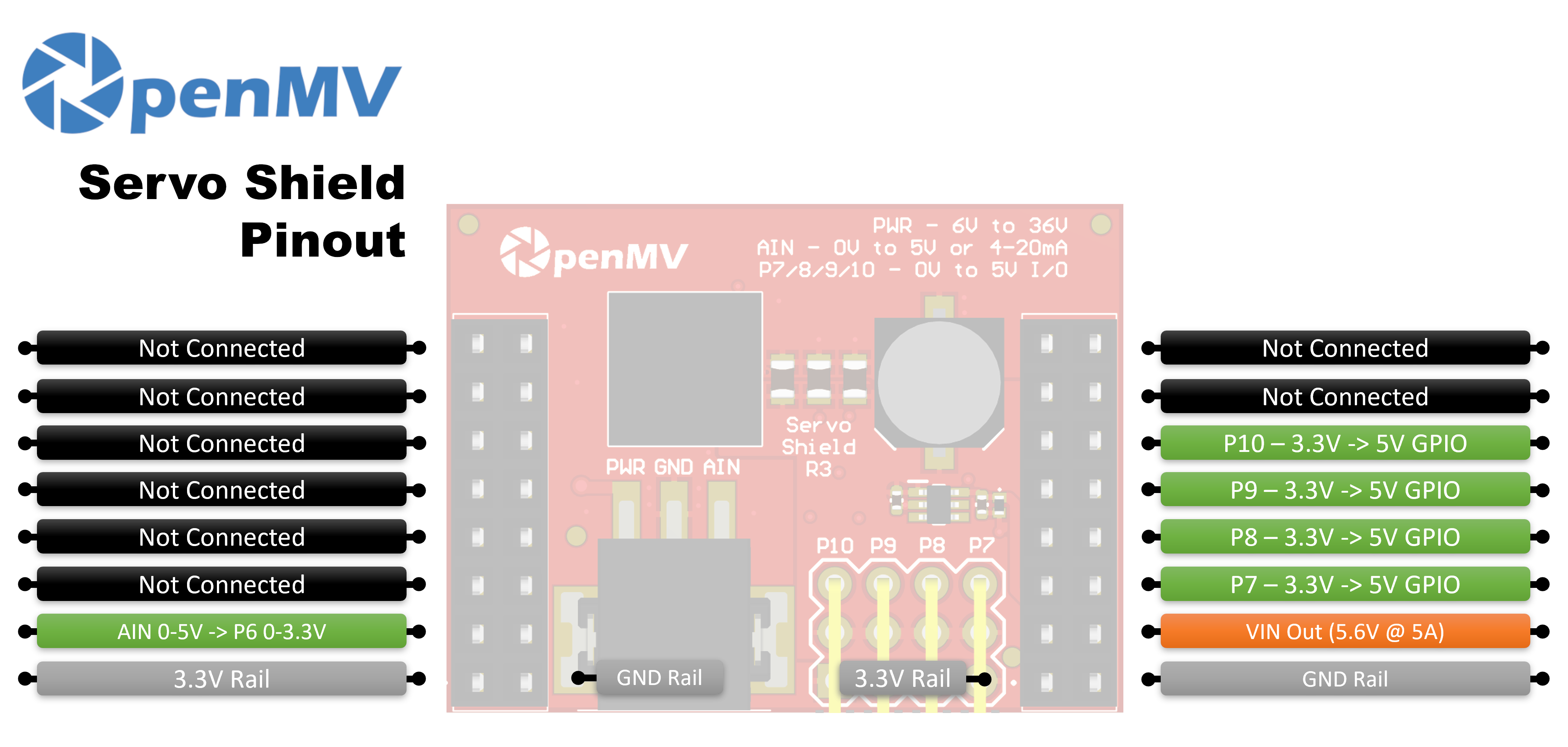
Referenca pinova¶
Pin |
Funkcija |
|---|---|
P6 |
Naponski prilagođeno očitanje AIN (0–3,3 V na P6) |
P7 |
Servo 1 — dvosmjerni 3,3 V ↔ 5 V GPIO |
P8 |
Servo 2 — dvosmjerni 3,3 V ↔ 5 V GPIO |
P9 |
Servo 3 — dvosmjerni 3,3 V ↔ 5 V GPIO |
P10 |
Servo 4 — dvosmjerni 3,3 V ↔ 5 V GPIO |
PWR ulaz |
6–36 V široki ulaz na priključnoj letvici (toleratan na obrnuti napon) |
AIN ulaz |
Analogni ulaz na priključnoj letvici |
VIN izlaz |
5,6 V regulirano, do 5 A ukupno za servo motore i kameru |
3,3 V vod |
Napaja ugrađenu elektroniku štita |
GND vod |
Zajednička masa |
Napomena
AIN je zaštićen od prenapona do ±36 V i zadano je naponski ulaz 0–5 V, smanjen na 0–3,3 V na P6. Premostite shunt načina rada 4–20 mA na stražnjoj strani štita da prebacite AIN na strujni ulaz 4–20 mA.
Napomena
Svaki od P6–P10 povezan je s kamerom putem 0-ohmskog otpornika na stražnjoj strani štita. Uklonite otpornik na bilo kojem pinu koji želite preuzeti za nepovezanu upotrebu.
Napomena
Na v2 verziji štita, P6–P9 su jednosmjerni 3,3 V → 5 V naponski prilagodnici (samo izlaz). P10 je open-drain digitalna linija, podignuta na 3,3 V na strani kamere i 5 V na strani servo pina. Zadano je ulaz — štit naponski prilagođava 0–5 V na servo pinu na 0–3,3 V na P10. Promijenite ugrađeni lemni premosnik da P10 prebacite u izlaz, naponski prilagođavajući 0–3,3 V na P10 na 0–5 V na servo pinu.
Upotreba¶
Upravljajte hobi servo motorom s bilo kojeg od P7–P10 PWM signalom od 50 Hz. Raspon širine impulsa razlikuje se među servo motorima, pa podesite MIN_US i MAX_US prema svojima — tipične vrijednosti su oko 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
servo = PWM(Pin("P7"), freq=50)
def angle(deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(0)
time.sleep(1)
angle(90)
time.sleep(1)
angle(180)
time.sleep(1)
Očitajte ulaz priključne letvice AIN (naponski prilagođeni rezultat pojavljuje se na P6):
from machine import ADC
import time
ain = ADC("P6")
while True:
# 0–5 V on the AIN terminal scaled to 0–3.3 V on P6
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)