Servo Shield¶
Servo Shield upravlja s do osam hobi servo motora paralelno s OpenMV kamere preko I2C, koristeći PCA9685 servo / PWM kontroler.
Za potpuni podatkovni list, fotografije i naručivanje pogledajte stranicu proizvoda Servo Shield.
Istaknute značajke¶
PCA9685 servo / PWM kontroler
Osam neovisnih servo kanala preko I2C
Slaže se s Motor Shieldom te Pan and Tilt Shieldom
Raspored pinova¶
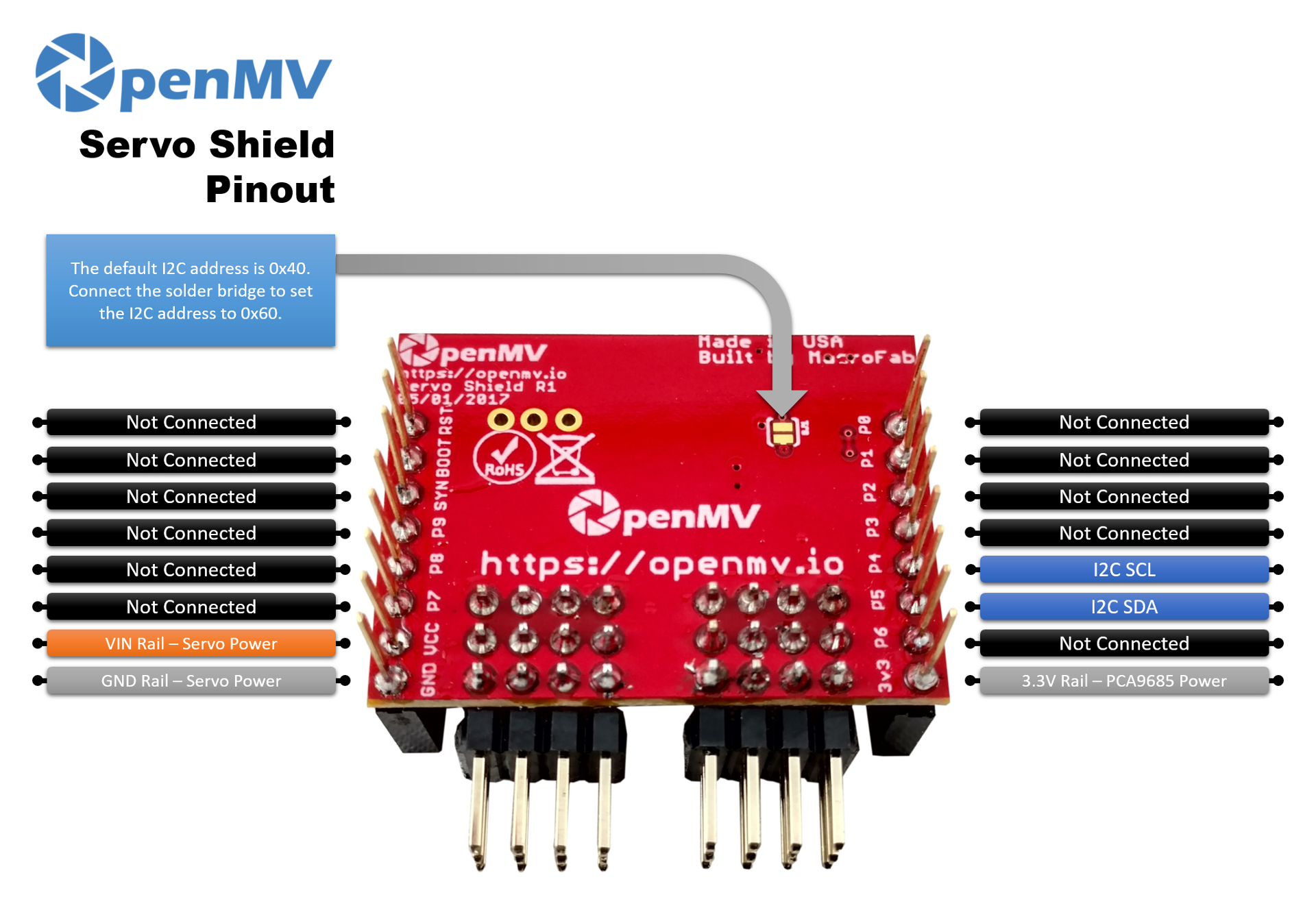
Referenca pinova¶
Pin |
Funkcija |
|---|---|
P4 |
I²C SCL — takt prema PCA9685 |
P5 |
I²C SDA — podaci prema PCA9685 |
VIN vod |
Napaja servo motore (s VIN pina kamere) |
3,3 V vod |
Napaja logiku PCA9685 |
GND vod |
Zajednička masa servo motora i kamere |
Zadana I²C adresa je 0x40. Spojite ugrađeni lemni premosnik da premjestite adresu na 0x60.
Napomena
Štit povlači napajanje servo motora izravno s VIN pina kamere. USB ne napaja VIN ni na jednoj OpenMV kameri, pa se VIN mora dovesti izvana (baterija, laboratorijsko napajanje ili slično) — odaberite izvor predviđen za zbroj struja zaustavljanja svih servo motora koje namjeravate pokretati.
Upotreba¶
Upravljajte s osam servo kanala kroz PCA9685 preko I²C. Raspon širine impulsa razlikuje se među servo motorima, pa podesite MIN_US i MAX_US prema svojima — tipične vrijednosti su oko 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 također rukuje općim 12-bitnim PWM-om na bilo kojoj frekvenciji — ponovno upotrijebite istu klasu s set_duty (0–4095) da, primjerice, postupno zatamnite LED na kanalu 0 pri 1 kHz. Pomoćna funkcija u nastavku skalira 0,0–100,0 % decimalnu vrijednost na raspon radnog ciklusa čipa 0–4095:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)