舵机扩展板¶
舵机扩展板使用 PCA9685 舵机 / PWM 控制器,可由 OpenMV Cam 通过 I2C 并行驱动多达八个业余舵机。
完整数据手册、照片以及订购信息请参见 舵机扩展板产品页面。
亮点¶
PCA9685 舵机 / PWM 控制器
通过 I2C 提供八个独立的舵机通道
可与电机扩展板和云台扩展板堆叠使用
引脚分布¶
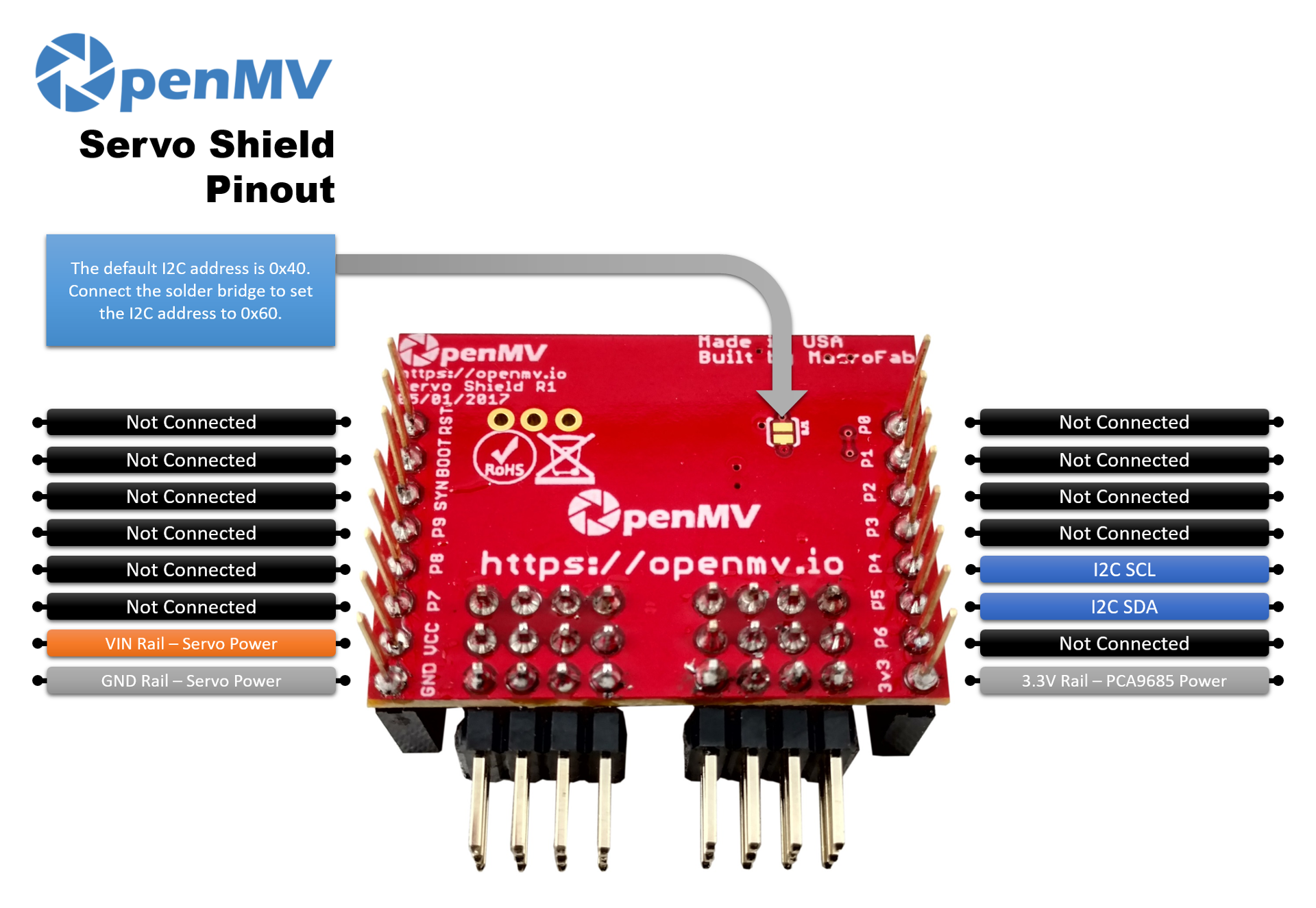
引脚参考¶
引脚 |
功能 |
|---|---|
P4 |
I²C SCL——通往 PCA9685 的时钟 |
P5 |
I²C SDA——通往 PCA9685 的数据 |
VIN 电源轨 |
为舵机供电(来自摄像头的 VIN 引脚) |
3.3V 电源轨 |
为 PCA9685 逻辑电路供电 |
GND 电源轨 |
舵机与摄像头的公共接地 |
默认 I²C 地址是 0x40。连接板载焊接跳线可将地址改为 0x60。
备注
扩展板的舵机电源直接取自摄像头的 VIN 引脚。任何 OpenMV Cam 的 USB 都不会为 VIN 供电,因此必须从外部为 VIN 供电(电池、台式电源或类似设备)——请选择一个额定值能满足你打算驱动的所有舵机合计堵转电流的电源。
用法¶
通过 PCA9685 经由 I²C 驱动这八个舵机通道。脉宽范围因舵机而异,因此请调整 MIN_US 和 MAX_US 以匹配你的舵机——典型值大约在 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 还可以在任意频率下处理通用的 12 位 PWM——复用同一个类,通过 set_duty(0–4095)即可,例如以 1 kHz 在通道 0 上让 LED 渐变。下面的辅助函数把 0.0–100.0% 的浮点值缩放到芯片的 0–4095 占空比范围:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)