Servo Shield¶
Servo Shield steruje równolegle maksymalnie ośmioma serwami modelarskimi z kamery OpenMV Cam przez I2C, wykorzystując kontroler serw / PWM PCA9685.
Pełną kartę katalogową, zdjęcia i informacje o zamawianiu znajdziesz na stronie produktu Servo Shield.
Najważniejsze cechy¶
Kontroler serw / PWM PCA9685
Osiem niezależnych kanałów serw przez I2C
Można łączyć z Motor Shield oraz Pan and Tilt Shield
Wyprowadzenia¶
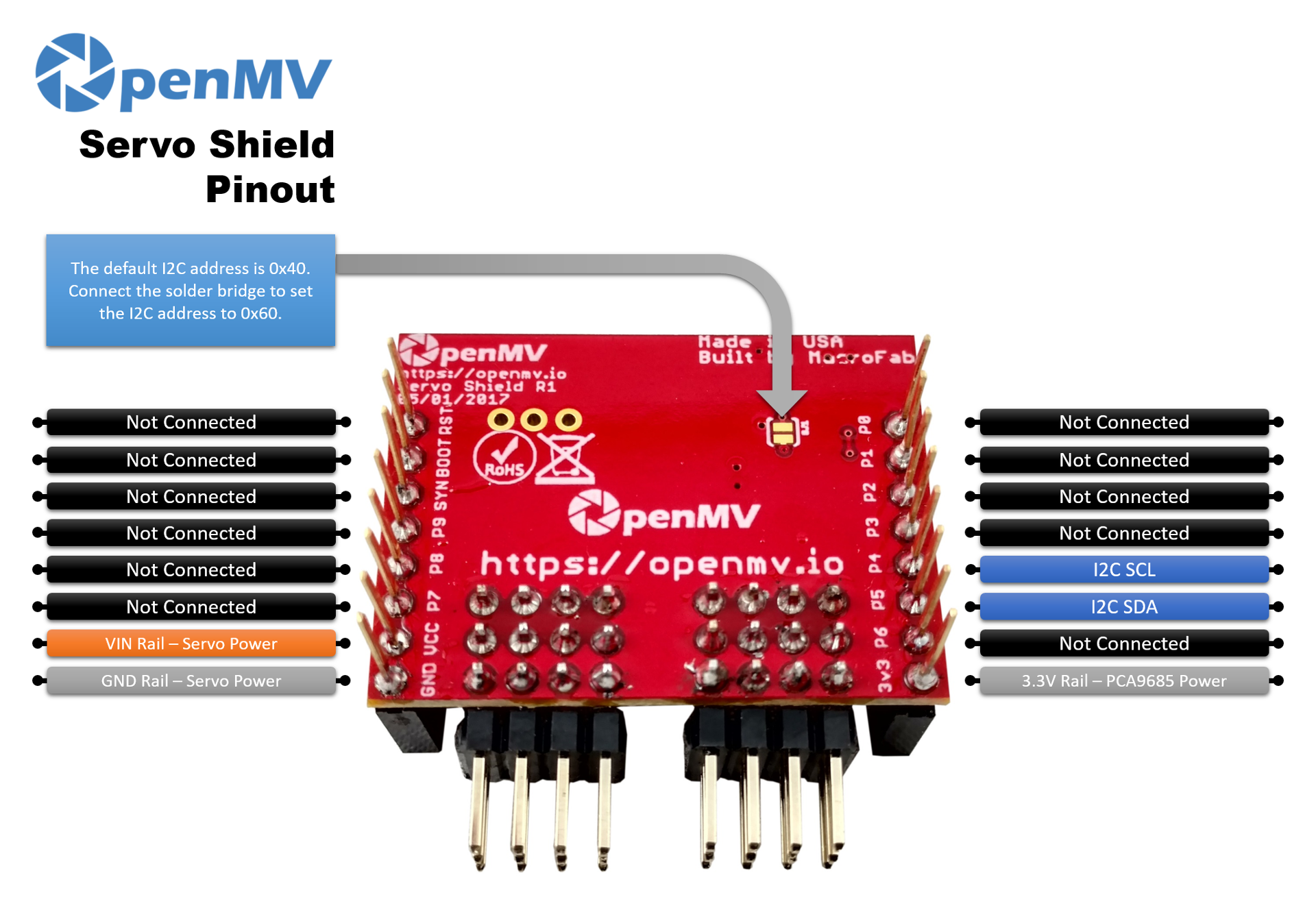
Opis pinów¶
Pin |
Funkcja |
|---|---|
P4 |
I²C SCL — zegar do PCA9685 |
P5 |
I²C SDA — dane do PCA9685 |
Szyna VIN |
Zasila serwa (z pinu VIN kamery) |
Szyna 3.3V |
Zasila logikę PCA9685 |
Szyna GND |
Wspólna masa serw i kamery |
Domyślny adres I²C to 0x40. Połącz wbudowaną zworę lutowniczą, aby zmienić adres na 0x60.
Informacja
Nakładka pobiera zasilanie serw bezpośrednio z pinu VIN kamery. USB nie zasila VIN na żadnej kamerze OpenMV Cam, więc VIN musi być dostarczone z zewnątrz (akumulator, zasilacz laboratoryjny itp.) — wybierz źródło dostosowane do łącznego prądu zatrzymania wszystkich serw, którymi planujesz sterować.
Użycie¶
Steruj ośmioma kanałami serw przez PCA9685 po I²C. Zakres szerokości impulsu różni się między serwami, więc dostrój MIN_US i MAX_US do swoich — typowe wartości to około 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 obsługuje także ogólny 12-bitowy PWM o dowolnej częstotliwości — wykorzystaj ponownie tę samą klasę z set_duty (0–4095), aby na przykład płynnie rozjaśnić diodę LED na kanale 0 przy 1 kHz. Poniższa funkcja pomocnicza skaluje liczbę zmiennoprzecinkową 0,0–100,0% na zakres wypełnienia 0–4095 układu:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)