Servo Shield¶
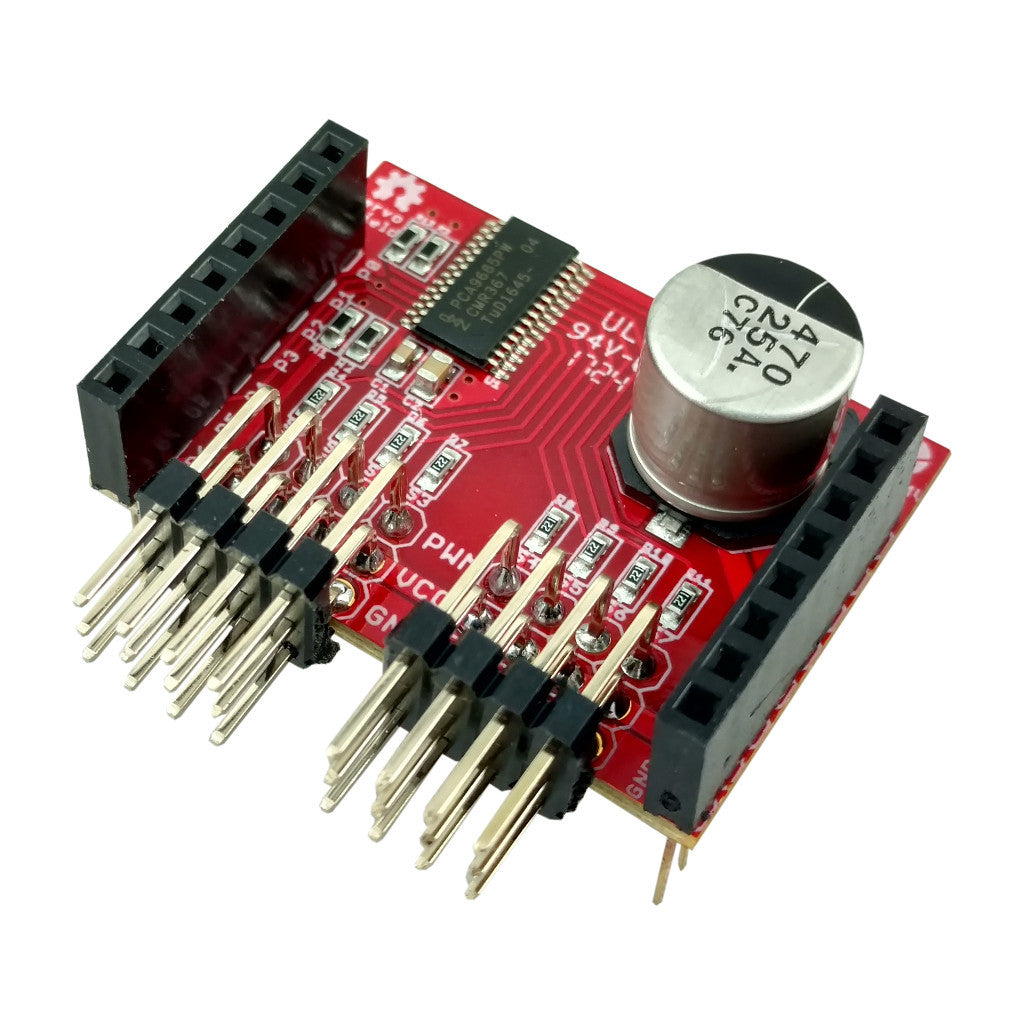
Das Servo Shield steuert bis zu acht Hobby-Servos parallel von der OpenMV Cam über I2C an, unter Verwendung eines PCA9685 Servo-/PWM-Controllers.
Vollständiges Datenblatt, Fotos und Bestellinformationen finden Sie auf der Produktseite des Servo Shields.
Highlights¶
PCA9685 Servo-/PWM-Controller
Acht unabhängige Servo-Kanäle über I2C
Stapelbar mit dem Motor Shield und dem Pan and Tilt Shield
Pinbelegung¶
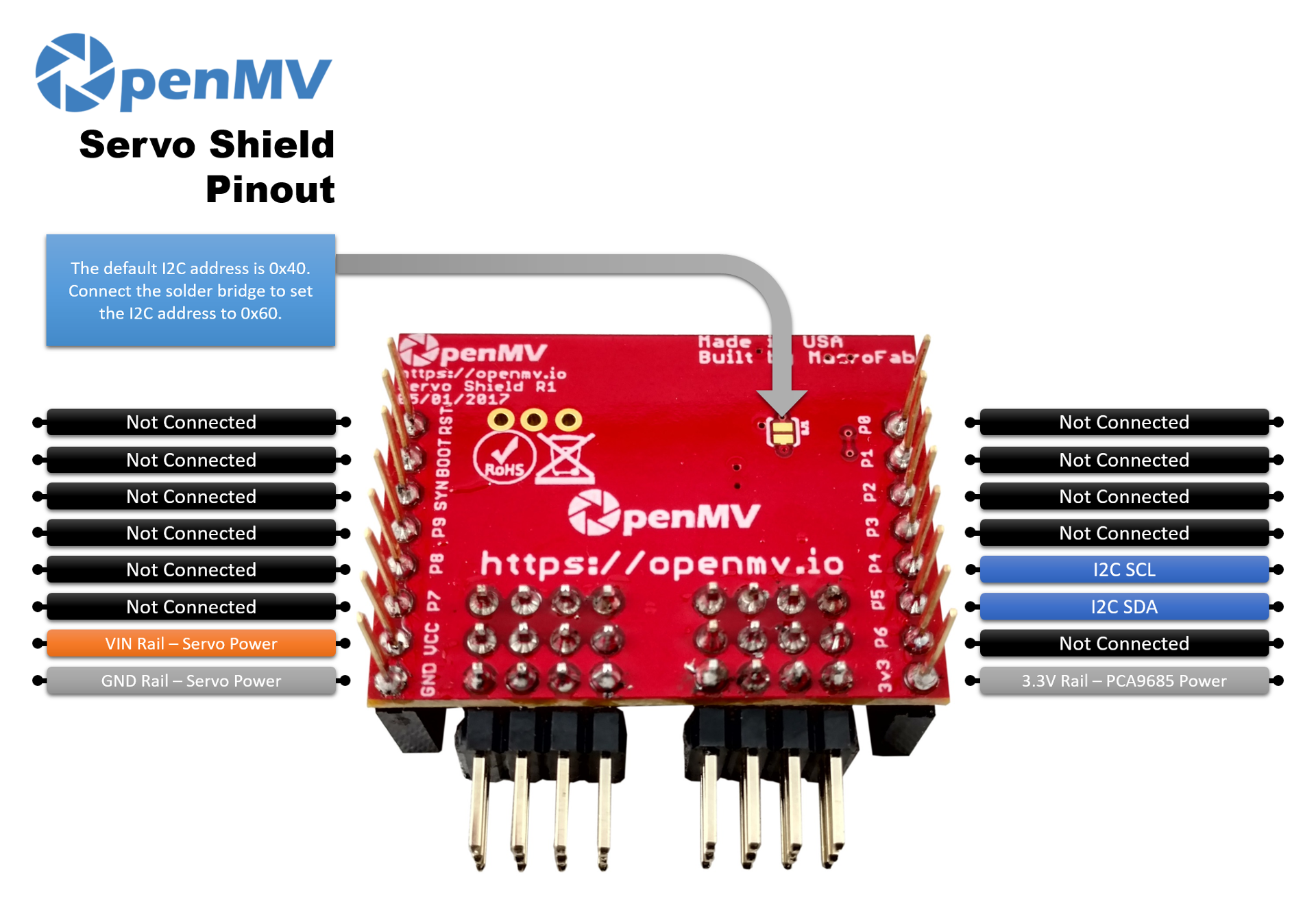
Pin-Referenz¶
Pin |
Funktion |
|---|---|
P4 |
I²C SCL — Takt zum PCA9685 |
P5 |
I²C SDA — Daten zum PCA9685 |
VIN rail |
Versorgt die Servos (vom VIN-Pin der Kamera) |
3.3V rail |
Versorgt die PCA9685-Logik |
GND rail |
Gemeinsame Masse für Servo und Kamera |
Die Standard-I²C-Adresse ist 0x40. Verbinden Sie die integrierte Lötbrücke, um die Adresse auf 0x60 zu verschieben.
Bemerkung
Das Shield bezieht die Servo-Stromversorgung direkt vom VIN-Pin der Kamera. USB speist VIN auf keiner OpenMV Cam, daher muss VIN extern bereitgestellt werden (Batterie, Labornetzteil oder Ähnliches) — wählen Sie eine Quelle, die für den kombinierten Anlaufstrom aller anzusteuernden Servos ausgelegt ist.
Verwendung¶
Steuern Sie die acht Servo-Kanäle über den PCA9685 per I²C an. Der Impulsbreitenbereich variiert zwischen Servos, passen Sie also MIN_US und MAX_US an Ihre an — typische Werte liegen bei etwa 1000–2000 µs:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
Der PCA9685 beherrscht auch allgemeine 12-Bit-PWM bei beliebiger Frequenz — verwenden Sie dieselbe Klasse mit set_duty (0–4095) erneut, um zum Beispiel eine LED an Kanal 0 mit 1 kHz zu dimmen. Der untenstehende Helfer skaliert einen Gleitkommawert von 0,0–100,0 % auf den 0–4095-Tastverhältnisbereich des Chips:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)