Servo Shield¶
Servo Shield управляет до восьми любительскими сервоприводами параллельно от камеры OpenMV Cam по I2C, используя контроллер сервоприводов / PWM PCA9685.
Полный datasheet, фотографии и информацию о заказе см. на странице продукта Servo Shield.
Ключевые особенности¶
Контроллер сервоприводов / PWM PCA9685
Восемь независимых каналов сервоприводов по I2C
Стыкуется с Motor Shield и Pan and Tilt Shield
Распиновка¶
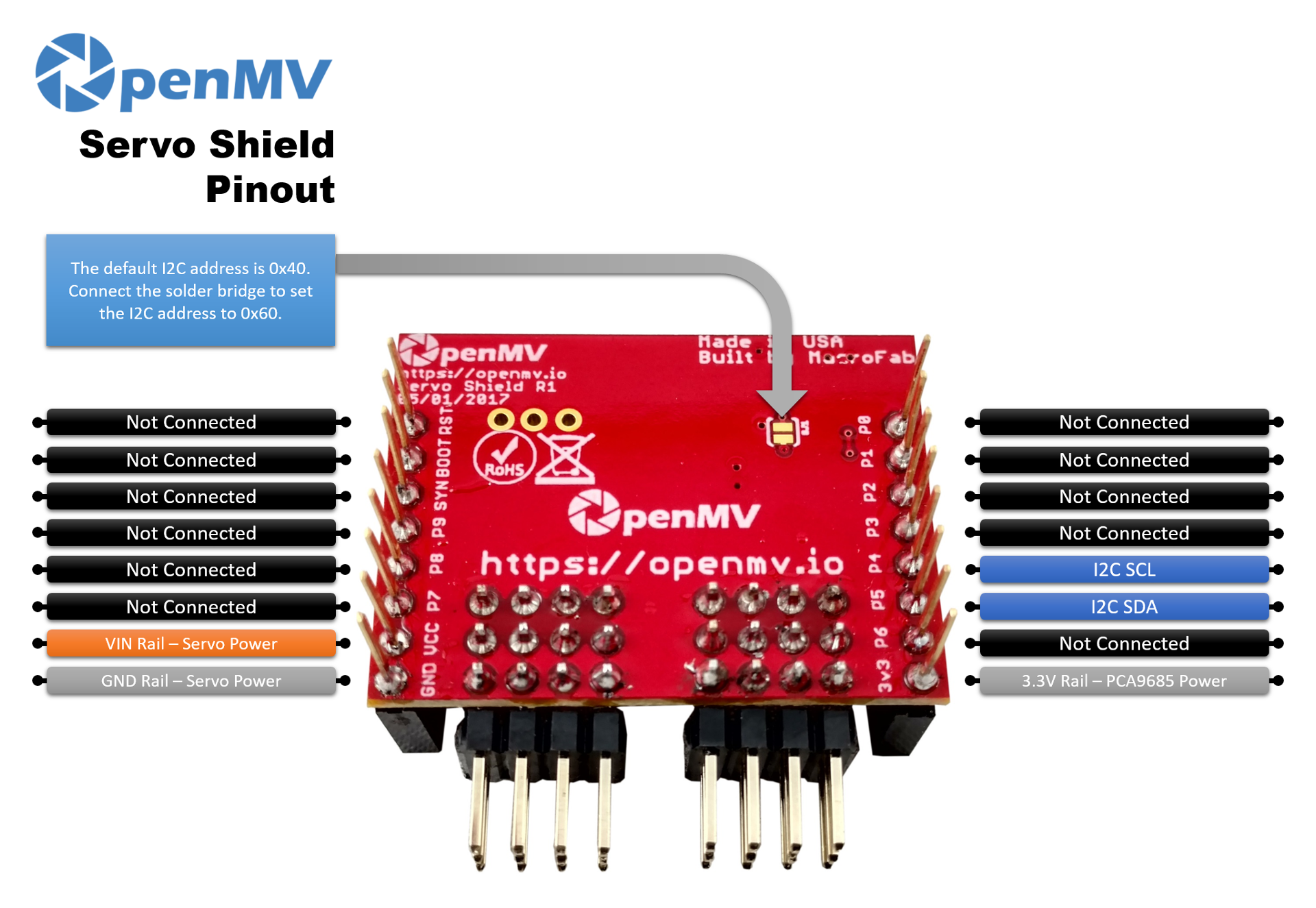
Справочник по выводам¶
Вывод |
Назначение |
|---|---|
P4 |
I²C SCL — тактовый сигнал к PCA9685 |
P5 |
I²C SDA — данные к PCA9685 |
Шина VIN |
Питает сервоприводы (от вывода VIN камеры) |
Шина 3.3V |
Питает логику PCA9685 |
Шина GND |
Общая земля сервоприводов и камеры |
Адрес I²C по умолчанию — 0x40. Замкните встроенную паяную перемычку, чтобы изменить адрес на 0x60.
Примечание
Шилд получает питание для сервоприводов напрямую с вывода VIN камеры. USB не питает VIN ни на одной камере OpenMV Cam, поэтому VIN необходимо подавать извне (аккумулятор, лабораторный источник питания или подобное) — выбирайте источник, рассчитанный на суммарный пусковой ток всех сервоприводов, которыми вы планируете управлять.
Использование¶
Управление восемью каналами сервоприводов через PCA9685 по I²C. Диапазон длительности импульса различается у разных сервоприводов, поэтому настройте MIN_US и MAX_US под свои — типичные значения составляют около 1000–2000 мкс:
import time
from machine import SoftI2C, Pin
class PCA9685:
"""Minimal PCA9685 driver — 12-bit PWM on any of 8 channels."""
def __init__(self, bus, address=0x40, freq=50):
self._bus = bus
self._addr = address
bus.writeto_mem(address, 0x00, b"\x00") # reset Mode1
prescale = round(25_000_000 / (4096 * freq)) - 1
bus.writeto_mem(address, 0x00, b"\x10") # sleep
bus.writeto_mem(address, 0xFE, bytes([prescale])) # prescale
bus.writeto_mem(address, 0x00, b"\x00") # wake
time.sleep_us(5)
bus.writeto_mem(address, 0x00, b"\xA1") # restart + AI + allcall
self._period_us = 1_000_000 // freq
def set_duty(self, channel, duty):
duty &= 0xFFF # 12-bit
if duty == 0:
on, off = 0, 0x1000 # FULL_OFF
elif duty == 0xFFF:
on, off = 0x1000, 0 # FULL_ON
else:
on, off = 0, duty
self._bus.writeto_mem(
self._addr, 0x06 + 4 * channel,
bytes([on & 0xFF, on >> 8, off & 0xFF, off >> 8]))
def set_us(self, channel, pulse_us):
self.set_duty(channel, (pulse_us * 4096) // self._period_us)
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=50)
def angle(channel, deg):
pca.set_us(channel, MIN_US + (deg * (MAX_US - MIN_US)) // 180)
while True:
for ch in range(8):
angle(ch, 0)
time.sleep_ms(2000)
for ch in range(8):
angle(ch, 180)
time.sleep_ms(2000)
PCA9685 также поддерживает обычный 12-битный PWM на любой частоте — используйте тот же класс с set_duty (0–4095), например, чтобы плавно зажигать светодиод на канале 0 на частоте 1 кГц. Вспомогательная функция ниже масштабирует число с плавающей точкой 0.0–100.0% в диапазон скважности 0–4095 микросхемы:
import time
from machine import SoftI2C, Pin
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"))
pca = PCA9685(bus, address=0x40, freq=1000)
def brightness(channel, pct):
pca.set_duty(channel, int(pct * 4095 / 100))
while True:
# Ramp up 0 → 100%.
for pct in range(101):
brightness(0, float(pct))
time.sleep_ms(20)
# Ramp down 100 → 0%.
for pct in reversed(range(101)):
brightness(0, float(pct))
time.sleep_ms(20)