Pan and Tilt Shield¶
Pan and Tilt Shield добавляет OpenMV Cam три канала сервоприводов с линейным стабилизатором 5 В NCP1117, который питает и камеру, и сервоприводы от единственного батарейного входа 6,5–18 В.

Полный datasheet, фотографии и информацию для заказа смотрите на странице продукта Pan and Tilt Shield.
Основные характеристики¶
Три независимых канала сервоприводов
Стыкуется с Servo Shield
Распиновка¶
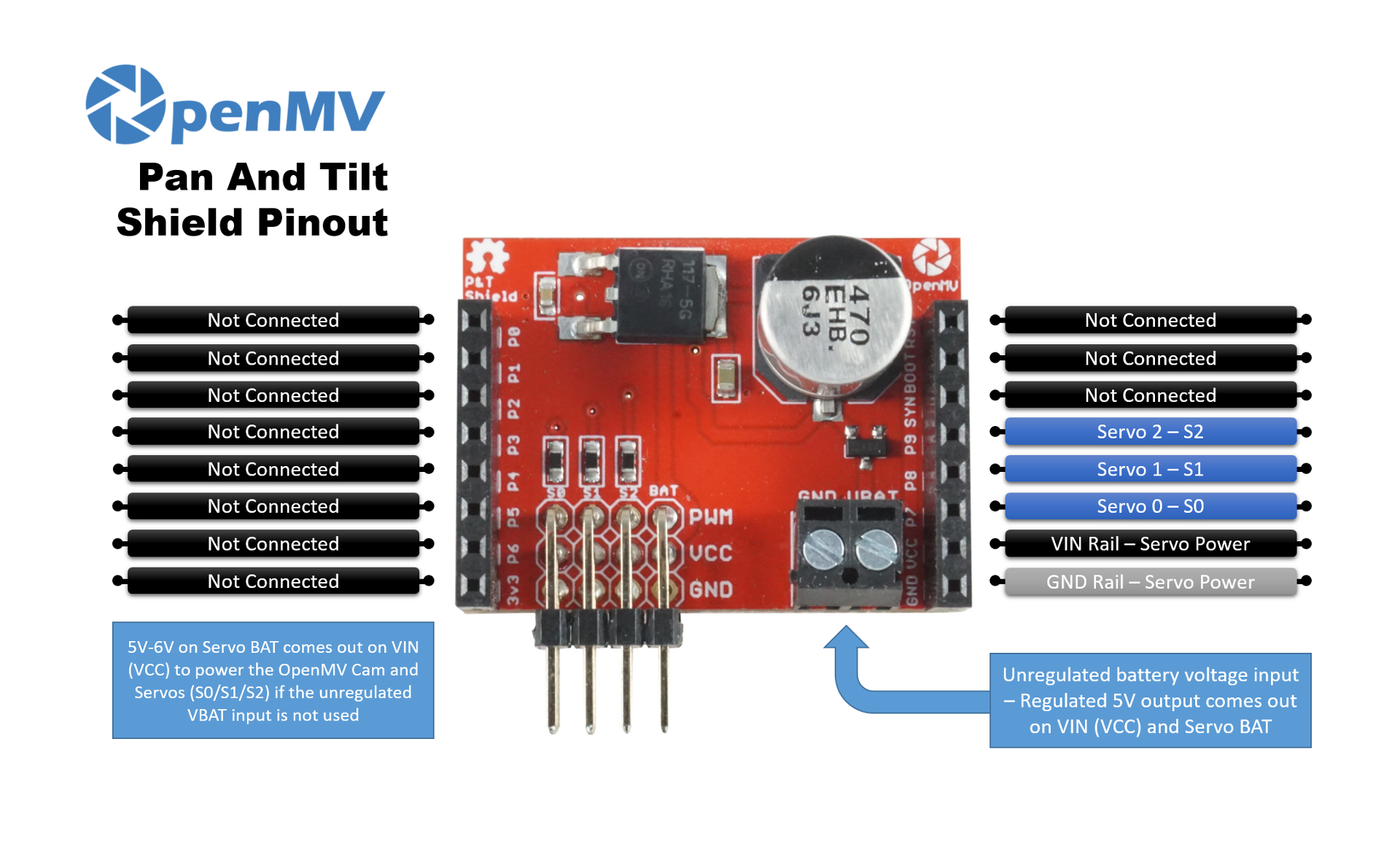
Описание выводов¶
Вывод |
Функция |
|---|---|
P7 |
Сервопривод 0 (S0) |
P8 |
Сервопривод 1 (S1) |
P9 |
Сервопривод 2 (S2) |
VBAT in |
Батарейный вход 6,5–18 В на винтовой клемме (ограничения NCP1117) |
VIN out |
5 В стабилизированных от встроенного NCP1117 — питает и камеру, и шину сервоприводов |
Шина GND |
Общая земля сервоприводов и камеры |
Использование¶
Управляйте тремя каналами сервоприводов с помощью PWM на 50 Гц. Диапазон длительности импульса различается у разных сервоприводов, поэтому настройте MIN_US и MAX_US под свои — типичные значения около 1000–2000 мкс:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)