Pan and Tilt Shield¶
Pan and Tilt Shield oferă plăcii OpenMV Cam trei canale de servomotor cu un regulator liniar NCP1117 de 5 V care alimentează atât camera, cât și servomotoarele de la o singură intrare de baterie de 6,5–18 V.
Pentru fișa tehnică completă, fotografii și comenzi, consultați pagina produsului Pan and Tilt Shield.
Caracteristici principale¶
Trei canale de servomotor independente
Se stivuiește cu Servo Shield
Pinout¶
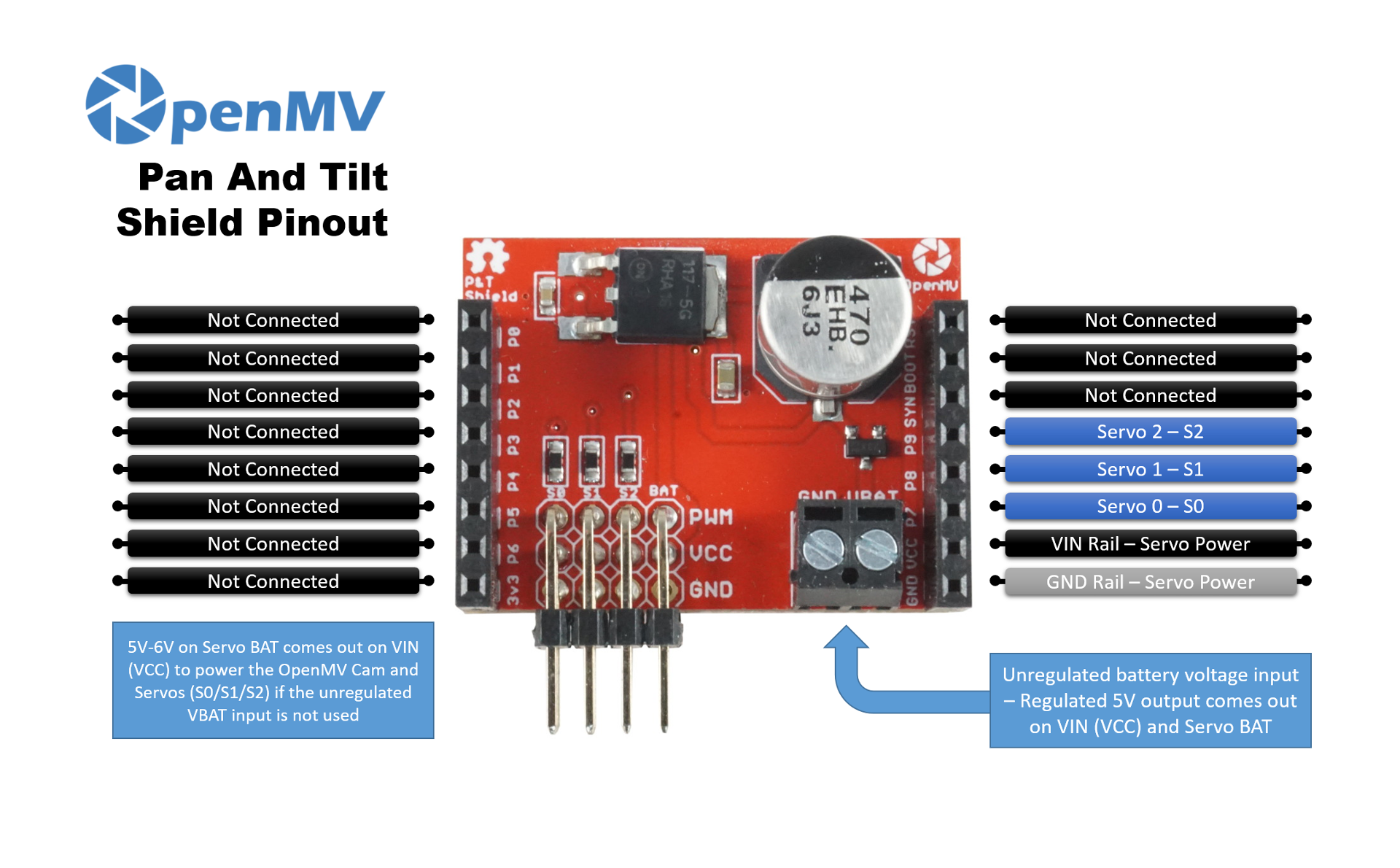
Referință pini¶
Pin |
Funcție |
|---|---|
P7 |
Servomotor 0 (S0) |
P8 |
Servomotor 1 (S1) |
P9 |
Servomotor 2 (S2) |
VBAT in |
Intrare de baterie de 6,5–18 V pe borna cu șurub (limitele NCP1117) |
VIN out |
5 V reglat de la NCP1117 de pe placă — alimentează atât camera, cât și linia servomotoarelor |
Linia GND |
Masă comună a servomotoarelor și a camerei |
Utilizare¶
Acționați cele trei canale de servomotor cu PWM de 50 Hz. Intervalul lățimii impulsului variază între servomotoare, așa că ajustați MIN_US și MAX_US pentru a se potrivi cu ale dvs. — valorile tipice sunt în jur de 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)