Pan and Tilt Shield¶
Pan and Tilt Shield, OpenMV Cam’e üç servo kanalı kazandırır ve hem kamerayı hem de servoları tek bir 6.5–18 V pil girişinden besleyen bir NCP1117 5 V doğrusal regülatör içerir.

Tam veri sayfası, fotoğraflar ve sipariş bilgileri için Pan and Tilt Shield ürün sayfasına bakın.
Öne Çıkanlar¶
Üç bağımsız servo kanalı
Servo Shield ile istiflenir
Pin Düzeni¶
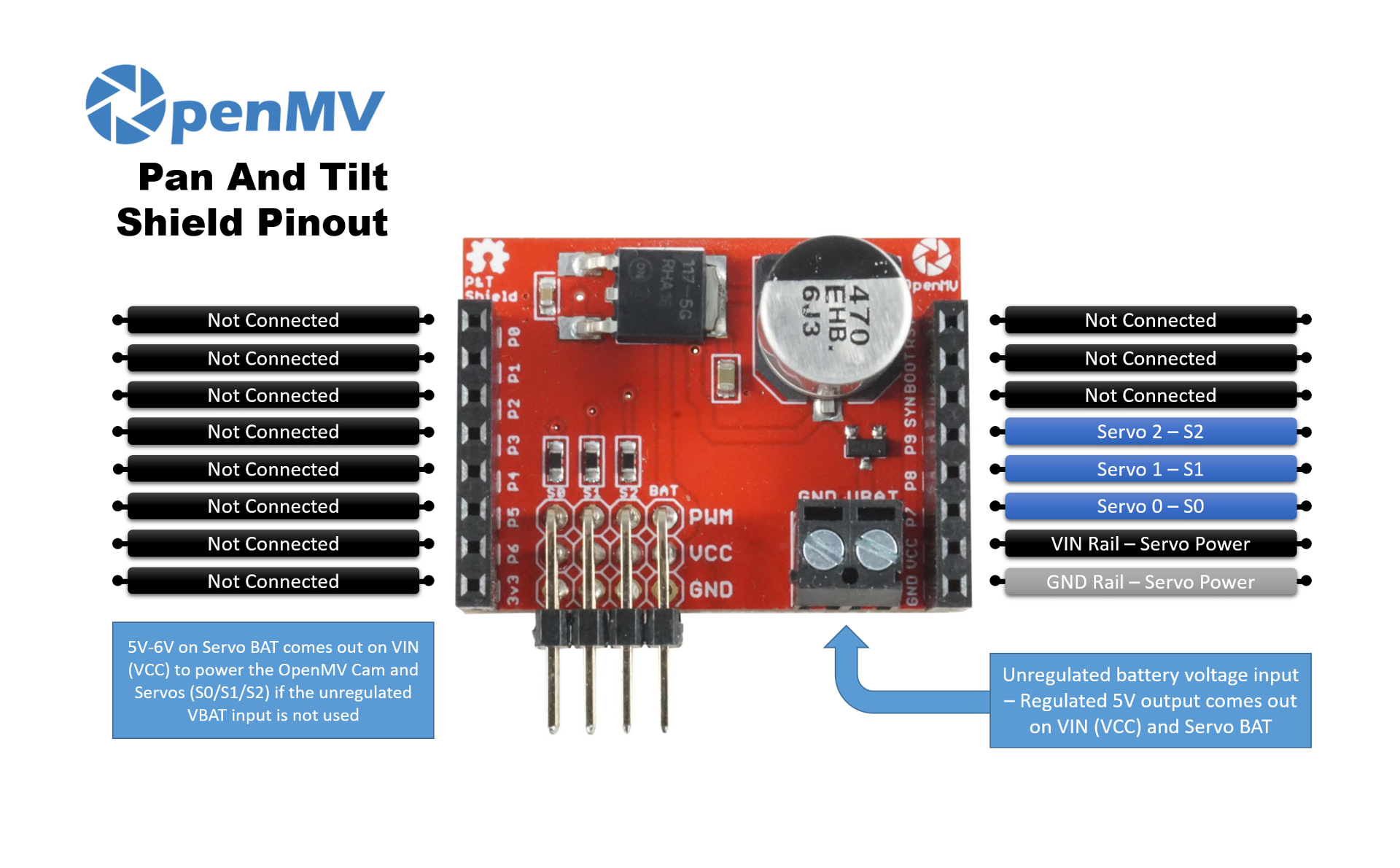
Pin referansı¶
Pin |
İşlev |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT girişi |
Vidalı terminal üzerinde 6.5–18 V pil girişi (NCP1117 sınırları) |
VIN çıkışı |
Kart üzerindeki NCP1117’den 5 V regüle edilmiş — hem kamerayı hem de servo hattını besler |
GND hattı |
Servo ve kamera ortak toprağı |
Kullanım¶
Üç servo kanalını 50 Hz PWM ile sürün. Darbe genişliği aralığı servolar arasında değişir, bu nedenle kendinizinkine uyacak şekilde MIN_US ve MAX_US değerlerini ayarlayın — tipik değerler 1000–2000 µs civarındadır:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)