Touch LCD Shield¶
Touch LCD Shield, OpenMV Cam’e 2,3 inçlik 320x240 kapasitif çoklu dokunmatik bir ekran kazandırarak kamera çıktısını bir ana bilgisayar olmadan önizlemenizi (ve girdi kabul etmenizi) sağlar. İki Qwiic başlığı, ek I2C cihazlarını zincirlemeyi kolaylaştırır.
Tam veri sayfası, fotoğraflar ve sipariş için bkz. Touch LCD Shield ürün sayfası.
Öne çıkanlar¶
2,3 inç TFT LCD, 320x240, 16-bit RGB565
Kapasitif çoklu dokunmatik girdi
PWM ile kontrol edilebilir arka aydınlatma
Kolay I2C cihaz zincirlemesi için iki Qwiic konektörü
Pin Dağılımı¶
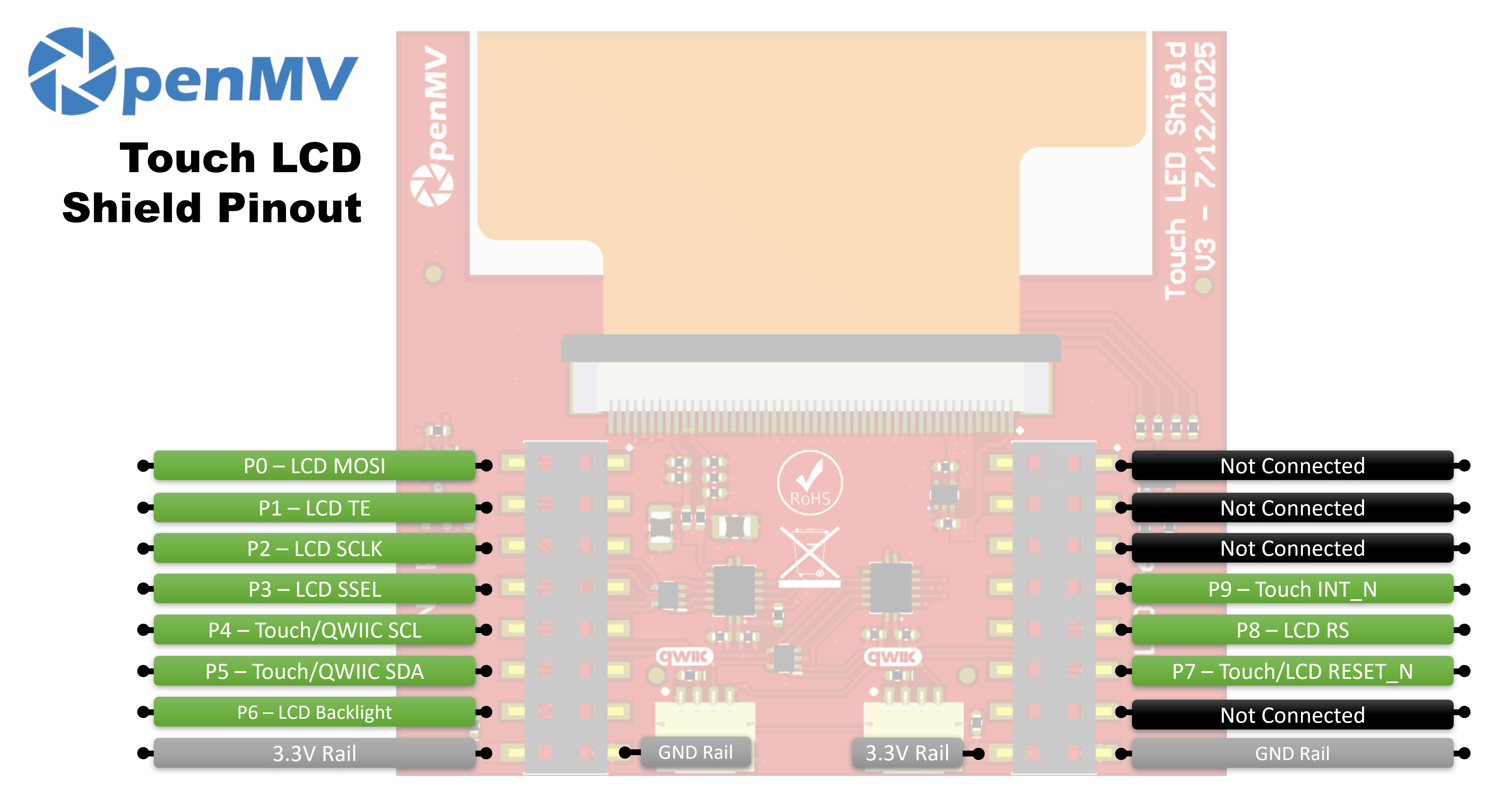
Pin referansı¶
Pin |
İşlev |
|---|---|
P0 |
LCD MOSI (ekrana SPI verisi) |
P1 |
LCD TE (yırtılma efekti çıkışı) |
P2 |
LCD SCLK (SPI saat sinyali) |
P3 |
LCD SSEL (SPI çip seçimi) |
P4 |
Dokunmatik / Qwiic SCL (I²C saat sinyali — Qwiic başlıklarıyla paylaşılır) |
P5 |
Dokunmatik / Qwiic SDA (I²C verisi — Qwiic başlıklarıyla paylaşılır) |
P6 |
LCD arka aydınlatma |
P7 |
Dokunmatik / LCD RESET_N |
P8 |
LCD RS (veri / komut seçimi) |
P9 |
Dokunmatik INT_N |
3,3V hattı |
LCD ve dokunmatik denetleyicilerini besler |
GND hattı |
Ortak toprak |
Kullanım¶
Shield’i display.SPIDisplay sınıfı üzerinden sürün. Kamera çerçevelerini 320×240 LCD’ye aktarın:
import csi
import time
import display
import image
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Ayarlanabilir parlaklık için arka aydınlatmayı PWM aracılığıyla sürün. machine.PWM nesnesini küçük bir arka aydınlatma denetleyici sınıfının içine sarın ve bunu backlight argümanı aracılığıyla SPIDisplay sınıfına geçirin — SPIDisplay, seviyeyi güncellemesi gerektiğinde nesne üzerinde backlight(value) çağrısı yapar:
import csi
import time
import display
import image
from machine import Pin, PWM
class PWMBacklight:
"""Drives a backlight pin with machine.PWM (0–100 %)."""
def __init__(self, pin, frequency=200):
self._pwm = PWM(Pin(pin), freq=frequency, duty_u16=0)
def backlight(self, value):
self._pwm.duty_u16(int(value * 65535 / 100))
def deinit(self):
self._pwm.deinit()
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False,
backlight=PWMBacklight("P6"))
lcd.backlight(50) # 0–100
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Yerleşik FT6x36 kapasitif denetleyiciden çoklu dokunmatik girdi okuyun — bu denetleyici P4/P5 üzerinden kameranın I²C veri yoluna, sıfırlama P7’ye ve IRQ P9’a bağlıdır. Aşağıdaki örnek, dokunmayı canlı kamera akışıyla birlikte kullanarak LCD üzerinde bir parmağın bastırıldığı her yere kırmızı bir daire çizer:
from time import sleep_ms
from array import array
from machine import Pin, SoftI2C
import csi
import display
import image
import time
_DEFAULT_ADDR = const(0x38)
_DEV_MODE = const(0x00)
_TD_STATUS = const(0x02)
class FT6X36:
FLAG_PRESSED = 0
FLAG_RELEASED = 1
FLAG_MOVED = 2
def __init__(
self,
bus,
reset_pin,
irq_pin,
address=_DEFAULT_ADDR,
width=320,
height=240,
reverse_x=False,
reverse_y=False,
touch_callback=None,
):
self.bus = bus
self.address = address
self.width = width
self.height = height
self.reverse_x = reverse_x
self.reverse_y = reverse_y
self.touch_callback = touch_callback
# reset_pin=None skips the reset pulse — useful when another
# peripheral on the same line (e.g. the LCD) has already done it.
if reset_pin is not None:
self.rst_pin = Pin(reset_pin, Pin.OUT_PP, value=0)
else:
self.rst_pin = None
self.irq_pin = None
self.irq_pin_label = irq_pin
# Reset the touch panel controller.
self.reset()
# Put the controller into normal operating mode.
self._write_reg(_DEV_MODE, 0x00)
# Scratch buffer for points (x, y, flag, id) — chip max 2.
self.points_data = [array("H", [0, 0, 0, 0]) for _ in range(2)]
self._touch_points_old = 0
self._touch_points = 0
def _read_reg(self, reg, size=1, buf=None):
# FT6X36 expects two separate START/STOP transactions
# (no repeated start), so don't use readfrom_mem here.
self.bus.writeto(self.address, bytes([reg]))
if buf is not None:
self.bus.readfrom_into(self.address, buf)
else:
return self.bus.readfrom(self.address, size)
def _write_reg(self, reg, val, size=1):
if size == 1:
buf = bytes([reg, val & 0xFF])
else:
buf = bytes([reg, val & 0xFF, val >> 8])
self.bus.writeto(self.address, buf)
def reset(self):
if self.irq_pin is not None:
self.irq_pin.irq(handler=None)
if self.rst_pin is not None:
self.rst_pin(0)
sleep_ms(1)
self.rst_pin(1)
sleep_ms(39)
self.irq_pin = Pin(self.irq_pin_label, Pin.IN, Pin.PULL_UP)
if self.touch_callback is not None:
self.irq_pin.irq(
handler=self.touch_callback,
trigger=Pin.IRQ_FALLING,
hard=False,
)
def read_points(self):
regs = self._read_reg(_TD_STATUS, 13)
n_points = min(regs[0] & 0x0F, 2)
for i in range(0, n_points):
base = 1 + i * 6
x = ((regs[base] & 0xF) << 8) | regs[base + 1]
y = ((regs[base + 2] & 0xF) << 8) | regs[base + 3]
if self.reverse_x:
x = self.width - 1 - x
if self.reverse_y:
y = self.height - 1 - y
self.points_data[i][0] = x
self.points_data[i][1] = y
self.points_data[i][2] = regs[base] >> 6
self.points_data[i][3] = regs[base + 2] >> 4
# Mark previously-active slots as released so the caller
# sees a release event after a finger lifts.
for i in range(n_points, 2):
self.points_data[i][2] = self.FLAG_RELEASED
# Latch touch count: rising immediate, falling debounced one read.
if n_points >= self._touch_points:
self._touch_points = n_points
elif n_points <= self._touch_points_old:
self._touch_points = self._touch_points_old
self._touch_points_old = n_points
return self._touch_points, self.points_data
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
# The LCD and touch controllers share P7 as a reset line. The LCD
# has already pulsed it during its own init, so init the touch
# controller after with reset_pin=None to skip a redundant pulse.
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"), freq=100_000)
touch = FT6X36(bus, reset_pin=None, irq_pin="P9", reverse_y=True)
clock = time.clock()
# Some sensors return less than 240 lines at QVGA (e.g. 320x200 on
# the N6). The display centers the frame, so map touch Y to image Y.
y_offset = (touch.height - csi0.height()) // 2
while True:
clock.tick()
img = csi0.snapshot()
n, points = touch.read_points()
for i in range(n):
x, y, flag, tid = points[i]
if flag != FT6X36.FLAG_RELEASED:
iy = y - y_offset
if 0 <= iy < csi0.height():
img.draw_circle(
(x, iy, 18), color=(255, 0, 0), thickness=2
)
lcd.write(img, hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())