Touch LCD Shield¶
Le Touch LCD Shield dote l’OpenMV Cam d’un écran tactile capacitif multipoint de 2,3 pouces en 320x240, vous permettant de prévisualiser la sortie de la caméra (et de saisir des entrées) sans ordinateur hôte. Deux connecteurs Qwiic facilitent le chaînage de périphériques I2C supplémentaires.
Pour la fiche technique complète, les photos et les commandes, consultez la page produit du Touch LCD Shield.
Points forts¶
Écran TFT LCD de 2,3 pouces, 320x240, RGB565 16 bits
Entrée tactile capacitive multipoint
Rétroéclairage contrôlable par PWM
Deux connecteurs Qwiic pour un chaînage facile de périphériques I2C
Brochage¶
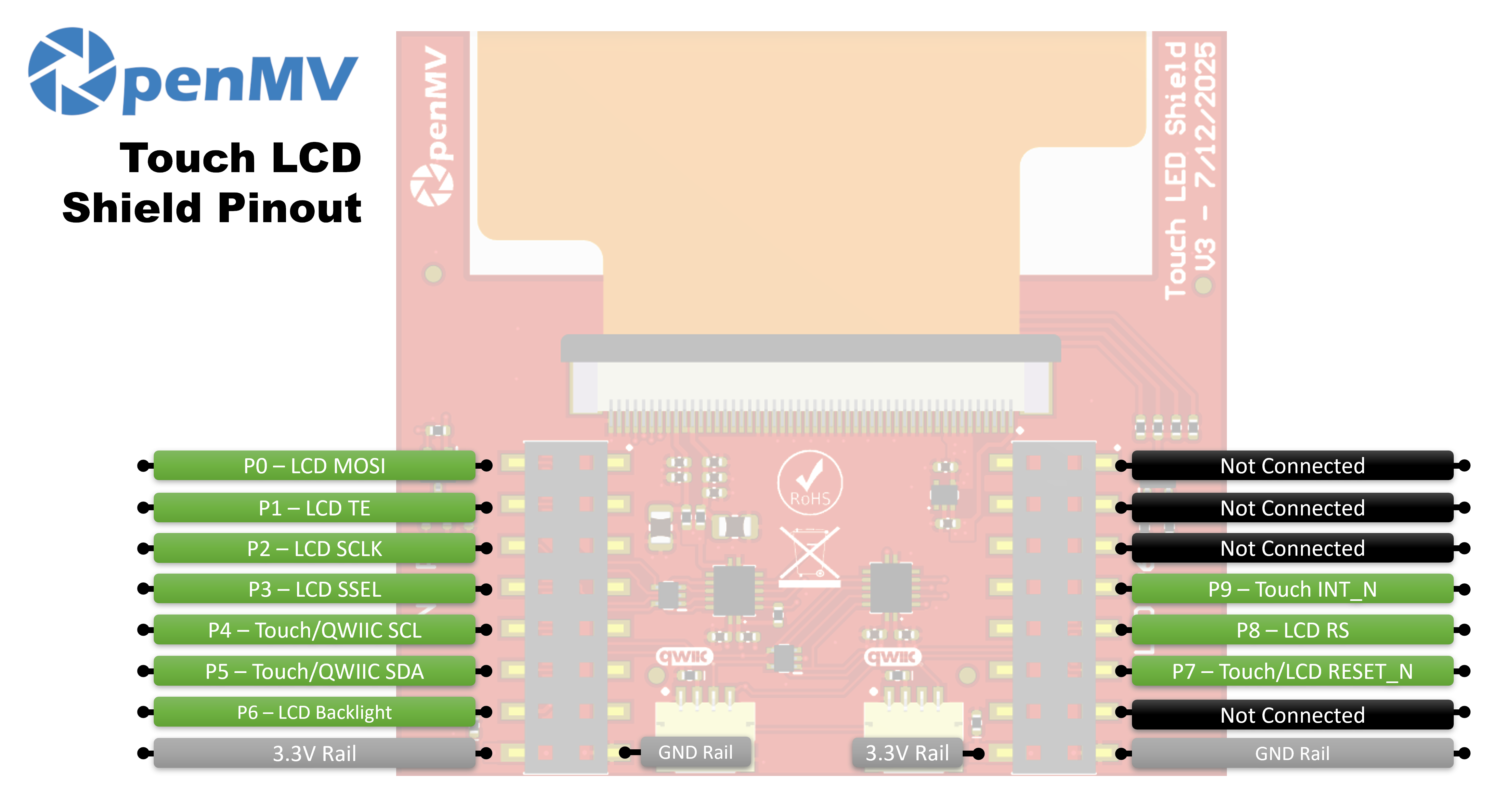
Référence des broches¶
Broche |
Fonction |
|---|---|
P0 |
LCD MOSI (données SPI vers l’écran) |
P1 |
LCD TE (sortie tearing-effect) |
P2 |
LCD SCLK (horloge SPI) |
P3 |
LCD SSEL (sélection de puce SPI) |
P4 |
Touch / Qwiic SCL (horloge I²C — partagée avec les connecteurs Qwiic) |
P5 |
Touch / Qwiic SDA (données I²C — partagées avec les connecteurs Qwiic) |
P6 |
Rétroéclairage LCD |
P7 |
Touch / LCD RESET_N |
P8 |
LCD RS (sélection données / commande) |
P9 |
Touch INT_N |
Rail 3,3 V |
Alimente les contrôleurs LCD et tactile |
Rail GND |
Masse commune |
Utilisation¶
Pilotez le shield via la classe display.SPIDisplay. Diffusez les trames de la caméra vers l’écran LCD 320×240:
import csi
import time
import display
import image
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Pilotez le rétroéclairage via PWM pour une luminosité ajustable. Encapsulez machine.PWM dans une petite classe de contrôle du rétroéclairage et passez-la à SPIDisplay via son argument backlight — SPIDisplay appelle backlight(value) sur l’objet chaque fois qu’il doit mettre à jour le niveau:
import csi
import time
import display
import image
from machine import Pin, PWM
class PWMBacklight:
"""Drives a backlight pin with machine.PWM (0–100 %)."""
def __init__(self, pin, frequency=200):
self._pwm = PWM(Pin(pin), freq=frequency, duty_u16=0)
def backlight(self, value):
self._pwm.duty_u16(int(value * 65535 / 100))
def deinit(self):
self._pwm.deinit()
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False,
backlight=PWMBacklight("P6"))
lcd.backlight(50) # 0–100
clock = time.clock()
while True:
clock.tick()
lcd.write(csi0.snapshot(), hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())
Lisez les entrées tactiles multipoint depuis le contrôleur capacitif FT6x36 intégré — raccordé au bus I²C de la caméra sur P4/P5 avec le reset sur P7 et l’IRQ sur P9. L’exemple ci-dessous combine le tactile avec la diffusion en direct de la caméra, dessinant un cercle rouge sur l’écran LCD à l’endroit où un doigt est appuyé:
from time import sleep_ms
from array import array
from machine import Pin, SoftI2C
import csi
import display
import image
import time
_DEFAULT_ADDR = const(0x38)
_DEV_MODE = const(0x00)
_TD_STATUS = const(0x02)
class FT6X36:
FLAG_PRESSED = 0
FLAG_RELEASED = 1
FLAG_MOVED = 2
def __init__(
self,
bus,
reset_pin,
irq_pin,
address=_DEFAULT_ADDR,
width=320,
height=240,
reverse_x=False,
reverse_y=False,
touch_callback=None,
):
self.bus = bus
self.address = address
self.width = width
self.height = height
self.reverse_x = reverse_x
self.reverse_y = reverse_y
self.touch_callback = touch_callback
# reset_pin=None skips the reset pulse — useful when another
# peripheral on the same line (e.g. the LCD) has already done it.
if reset_pin is not None:
self.rst_pin = Pin(reset_pin, Pin.OUT_PP, value=0)
else:
self.rst_pin = None
self.irq_pin = None
self.irq_pin_label = irq_pin
# Reset the touch panel controller.
self.reset()
# Put the controller into normal operating mode.
self._write_reg(_DEV_MODE, 0x00)
# Scratch buffer for points (x, y, flag, id) — chip max 2.
self.points_data = [array("H", [0, 0, 0, 0]) for _ in range(2)]
self._touch_points_old = 0
self._touch_points = 0
def _read_reg(self, reg, size=1, buf=None):
# FT6X36 expects two separate START/STOP transactions
# (no repeated start), so don't use readfrom_mem here.
self.bus.writeto(self.address, bytes([reg]))
if buf is not None:
self.bus.readfrom_into(self.address, buf)
else:
return self.bus.readfrom(self.address, size)
def _write_reg(self, reg, val, size=1):
if size == 1:
buf = bytes([reg, val & 0xFF])
else:
buf = bytes([reg, val & 0xFF, val >> 8])
self.bus.writeto(self.address, buf)
def reset(self):
if self.irq_pin is not None:
self.irq_pin.irq(handler=None)
if self.rst_pin is not None:
self.rst_pin(0)
sleep_ms(1)
self.rst_pin(1)
sleep_ms(39)
self.irq_pin = Pin(self.irq_pin_label, Pin.IN, Pin.PULL_UP)
if self.touch_callback is not None:
self.irq_pin.irq(
handler=self.touch_callback,
trigger=Pin.IRQ_FALLING,
hard=False,
)
def read_points(self):
regs = self._read_reg(_TD_STATUS, 13)
n_points = min(regs[0] & 0x0F, 2)
for i in range(0, n_points):
base = 1 + i * 6
x = ((regs[base] & 0xF) << 8) | regs[base + 1]
y = ((regs[base + 2] & 0xF) << 8) | regs[base + 3]
if self.reverse_x:
x = self.width - 1 - x
if self.reverse_y:
y = self.height - 1 - y
self.points_data[i][0] = x
self.points_data[i][1] = y
self.points_data[i][2] = regs[base] >> 6
self.points_data[i][3] = regs[base + 2] >> 4
# Mark previously-active slots as released so the caller
# sees a release event after a finger lifts.
for i in range(n_points, 2):
self.points_data[i][2] = self.FLAG_RELEASED
# Latch touch count: rising immediate, falling debounced one read.
if n_points >= self._touch_points:
self._touch_points = n_points
elif n_points <= self._touch_points_old:
self._touch_points = self._touch_points_old
self._touch_points_old = n_points
return self._touch_points, self.points_data
csi0 = csi.CSI()
csi0.reset()
csi0.pixformat(csi.RGB565)
csi0.framesize(csi.QVGA)
lcd = display.SPIDisplay(width=320,
height=240,
bgr=True,
vflip=False,
hmirror=False)
# The LCD and touch controllers share P7 as a reset line. The LCD
# has already pulsed it during its own init, so init the touch
# controller after with reset_pin=None to skip a redundant pulse.
bus = SoftI2C(scl=Pin("P4"), sda=Pin("P5"), freq=100_000)
touch = FT6X36(bus, reset_pin=None, irq_pin="P9", reverse_y=True)
clock = time.clock()
# Some sensors return less than 240 lines at QVGA (e.g. 320x200 on
# the N6). The display centers the frame, so map touch Y to image Y.
y_offset = (touch.height - csi0.height()) // 2
while True:
clock.tick()
img = csi0.snapshot()
n, points = touch.read_points()
for i in range(n):
x, y, flag, tid = points[i]
if flag != FT6X36.FLAG_RELEASED:
iy = y - y_offset
if 0 <= iy < csi0.height():
img.draw_circle(
(x, iy, 18), color=(255, 0, 0), thickness=2
)
lcd.write(img, hint=image.CENTER | image.SCALE_ASPECT_KEEP)
print(clock.fps())