Pan and Tilt Shield¶
Pan and Tilt Shield dává OpenMV Cam tři servo kanály s lineárním regulátorem 5 V NCP1117, který napájí jak kameru, tak serva z jediného bateriového vstupu 6,5–18 V.

Kompletní katalogový list, fotografie a možnost objednání najdete na produktové stránce Pan and Tilt Shield.
Přehled¶
Tři nezávislé servo kanály
Lze stohovat se Servo Shield
Rozložení pinů¶
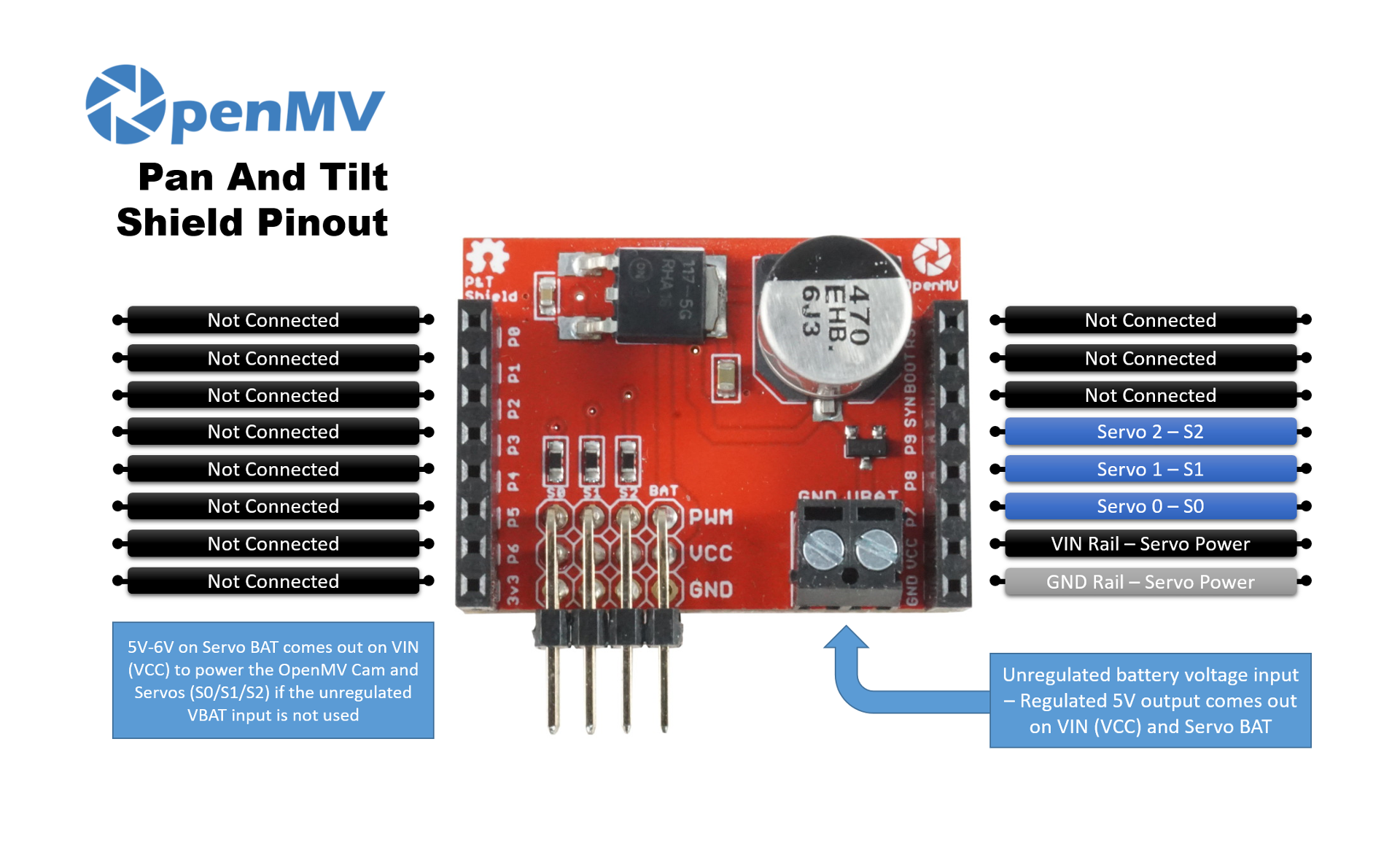
Reference pinů¶
Pin |
Funkce |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
Bateriový vstup 6,5–18 V na šroubovací svorce (limity NCP1117) |
VIN out |
5 V regulovaných z palubního NCP1117 — napájí jak kameru, tak větev serv |
Větev GND |
Společná zem serv a kamery |
Použití¶
Pohánějte tři servo kanály pomocí PWM 50 Hz. Rozsah šířky pulzu se mezi servy liší, takže vylaďte MIN_US a MAX_US tak, aby odpovídaly vašim — typické hodnoty jsou kolem 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)