Driver Shield¶
Driver Shield pohání dva motory o proudu 3 A nebo čtyři nezávislé budiče s proudem 1,5 A z širokého napájecího rozsahu 6-36 V, čímž dává OpenMV Cam robustní vstupní stupeň pro řízení motorů s ochranou proti přepólování a napěťovým rázům.
Kompletní katalogový list, fotografie a možnost objednání najdete na produktové stránce Driver Shield.
Přehled¶
Dva budiče motorů 3 A NEBO čtyři budiče linek 1,5 A, 6-36 V
Ochrana proti přepólování a přechodovým napěťovým rázům na vstupu
ADC vstup 0-5 V s ochranou proti přepětí ±36 V
Digitální I/O 0-5 V pro spouštěče synchronizace kamery, s ochranou proti zkratu
Rozložení pinů¶
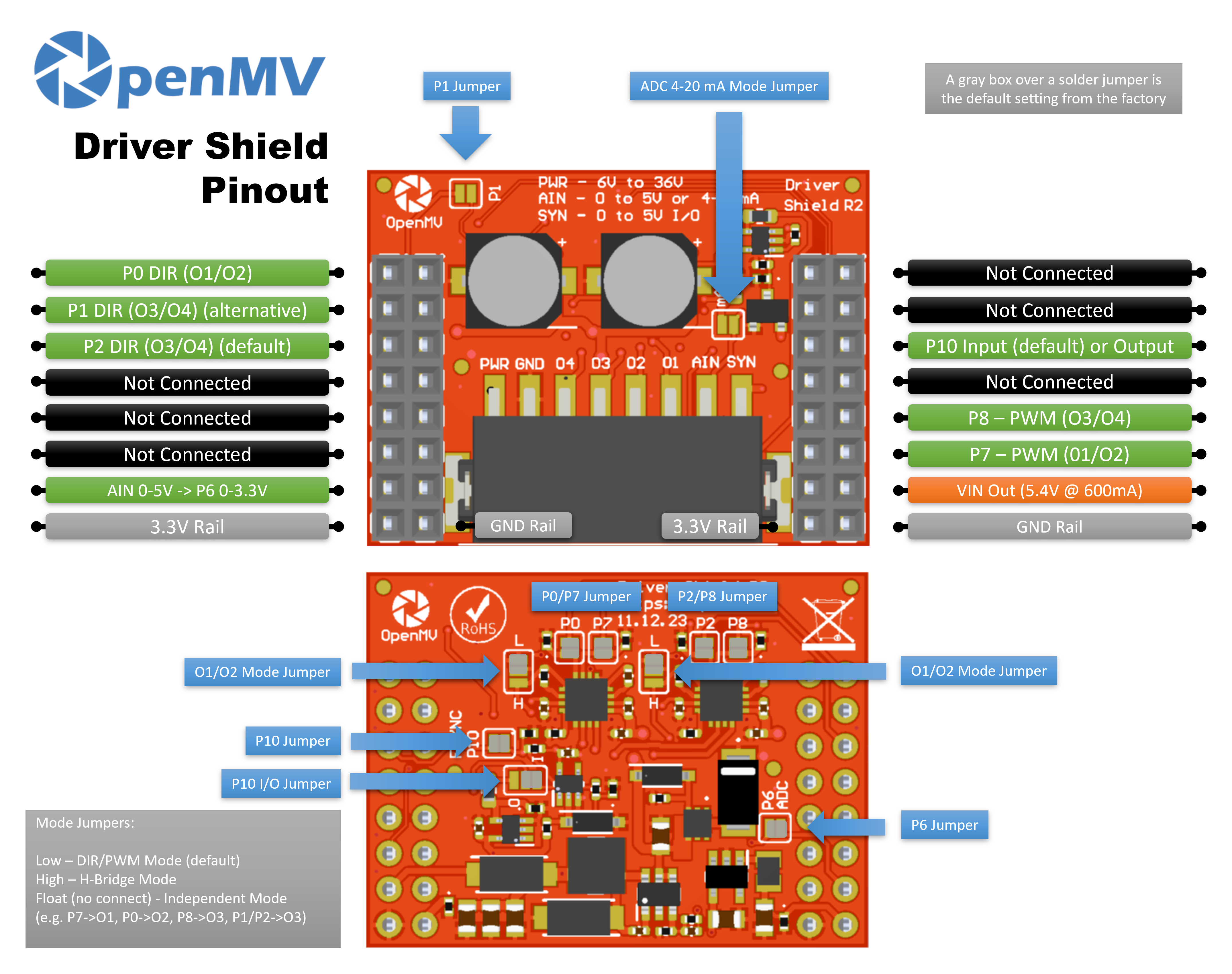
Reference pinů¶
Pin |
Funkce |
|---|---|
P0 |
DIR pro výstupní dvojici O1/O2 |
P1 |
DIR pro výstupní dvojici O3/O4 (alternativní) |
P2 |
DIR pro výstupní dvojici O3/O4 (výchozí) |
P6 |
Úrovňově posunuté zpětné čtení AIN (0–3,3 V na P6) |
P7 |
PWM pro výstupní dvojici O1/O2 |
P8 |
PWM pro výstupní dvojici O3/O4 |
P10 |
SYN — digitální I/O s otevřeným kolektorem na svorkovnici |
PWR in |
Široký vstup 6–36 V na svorkovnici (tolerantní k přepólování) |
AIN in |
Analogový vstup na svorkovnici |
VIN out |
5,4 V při proudu až 600 mA z palubního regulátoru |
Větev 3,3V |
Napájí palubní elektroniku shieldu |
Větev GND |
Společná zem |
Poznámka
AIN je chráněn proti přepětí až do ±36 V a ve výchozím nastavení je napěťovým vstupem 0–5 V, zmenšeným na 0–3,3 V na P6. Přemostěním propojky režimu 4–20 mA na přední straně shieldu přepnete AIN na proudový vstup proudové smyčky 4–20 mA.
Poznámka
SYN je digitální linka s otevřeným kolektorem, vytažená na 3,3 V na straně kamery a na 5 V na straně svorky SYN. Ve výchozím nastavení je vstupem — shield úrovňově posouvá 0–5 V na SYN dolů na 0–3,3 V na P10. Změnou palubní pájecí propojky převrátíte P10 na výstup, který úrovňově posouvá 0–3,3 V na P10 nahoru na 0–5 V na SYN.
Poznámka
Každý z pinů P0, P1, P2, P6, P7, P8 a P10 lze znovu využít pro jiný účel. P0, P2, P6, P7, P8 a P10 jsou ve výchozím nastavení propojeny pájecími propojkami na zadní straně — rozpojte propojku libovolného pinu, který chcete uvolnit. P1 je ve výchozím nastavení odpojen: přemostěním jeho propojky na přední straně směřujete DIR pro O3/O4 místo toho na P1 (a rozpojením zadní propojky P2 uvolníte P2).
Poznámka
Dvě propojky režimu na zadní straně shieldu — jedna na každý H-můstek — nezávisle nastavují každou výstupní dvojici do jednoho ze tří režimů. Každá propojka má značky L a H, které ukazují, která strana volí který stav:
Low (výchozí) — režim DIR/PWM: jeden pin DIR + jeden pin PWM na můstek.
High — režim H-můstku: oba piny řídí můstek přímo prostřednictvím pravdivostní tabulky se dvěma vstupy daného čipu.
Float (bez připojení) — nezávislý režim: každý pin se stává samostatným budičem linky vedeným na jeden výstup.
Každý DRV8876 je proudově omezen na 3 A celkem na čip — to je 3 A přes jeden můstek (režim DIR/PWM nebo H-můstku) nebo 1,5 A na výstup rozdělených mezi dva výstupy (nezávislý režim).
Použití¶
Režim DIR/PWM (výchozí)¶
Pohánějte kartáčový DC motor na výstupní dvojici O1/O2 — nastavte směr na P0 a přiveďte PWM signál rychlosti na P7. Smyčka níže zvyšuje střídu až na plnou rychlost a zpět dolů, poté převrátí směr a opakuje:
from machine import Pin, PWM
import time
direction = Pin("P0", Pin.OUT)
speed = PWM(Pin("P7"), freq=20_000, duty_u16=0)
def ramp(target):
for duty in range(0, target, 1024):
speed.duty_u16(duty)
time.sleep_ms(10)
for duty in range(target, -1, -1024):
speed.duty_u16(duty)
time.sleep_ms(10)
while True:
direction.value(1) # forward
ramp(65_535)
direction.value(0) # reverse
ramp(65_535)
Dva H-můstky mohou také pohánět bipolární krokový motor — držte oba PWM kanály na plném buzení a krokujte piny DIR čtyřfázovou sekvencí:
from machine import Pin, PWM
import time
dir12 = Pin("P0", Pin.OUT)
dir34 = Pin("P2", Pin.OUT)
PWM(Pin("P7"), freq=20_000, duty_u16=65_535) # full drive on O1/O2
PWM(Pin("P8"), freq=20_000, duty_u16=65_535) # full drive on O3/O4
SEQUENCE = [(1, 1), (0, 1), (0, 0), (1, 0)]
def step(forward=True):
for a, b in SEQUENCE if forward else reversed(SEQUENCE):
dir12.value(a)
dir34.value(b)
time.sleep_ms(5)
while True:
for _ in range(50): # ~1 revolution forward (200 phases)
step()
for _ in range(50): # ~1 revolution backward
step(forward=False)
Režim H-můstku¶
S propojkou režimu nastavenou na high řídí oba piny můstku H-můstek přímo. Pro O1/O2 je pravdivostní tabulka:
(P0, P7) = (L, L)→ doběh (výstupy Hi-Z)(P0, P7) = (L, H)→ vpřed (O1 = H, O2 = L)(P0, P7) = (H, L)→ vzad (O1 = L, O2 = H)(P0, P7) = (H, H)→ brzdění (oba výstupy nízké)
(O3/O4 sleduje stejnou tabulku s P1/P2 a P8.) Smyčka níže cykluje motor přes vpřed → brzdění → vzad → doběh na výstupní dvojici O1/O2:
from machine import Pin
import time
p0 = Pin("P0", Pin.OUT)
p7 = Pin("P7", Pin.OUT)
def drive(a, b):
p0.value(a)
p7.value(b)
while True:
drive(0, 1) # forward
time.sleep(1)
drive(1, 1) # brake
time.sleep_ms(500)
drive(1, 0) # reverse
time.sleep(1)
drive(0, 0) # coast
time.sleep_ms(500)
Kterýkoli pin lze nahradit kanálem machine.PWM pro proporcionální buzení — např. (P0=0, P7=PWM) dává vpřed/doběh při střídě PWM, (P0=1, P7=PWM) dává vzad/brzdění při (100 % − duty). Smyčka níže zvyšuje a snižuje střídu s P0 drženým na 0 (vpřed/doběh):
from machine import Pin, PWM
import time
p0 = Pin("P0", Pin.OUT, value=0)
p7 = PWM(Pin("P7"), freq=20_000, duty_u16=0)
while True:
for duty in range(0, 65_536, 1024):
p7.duty_u16(duty)
time.sleep_ms(10)
for duty in range(65_535, -1, -1024):
p7.duty_u16(duty)
time.sleep_ms(10)
Nezávislý režim¶
S plovoucí propojkou režimu se každý pin stává samostatným budičem linky vedeným na jeden výstup — užitečné pro solenoidy, relé nebo jakoukoli zapínací/vypínací zátěž, která nepotřebuje H-můstek. Mapování je P7 → O1, P0 → O2, P8 → O3 a P1 (nebo P2) → O4:
from machine import Pin
import time
outputs = [
Pin("P7", Pin.OUT), # O1
Pin("P0", Pin.OUT), # O2
Pin("P8", Pin.OUT), # O3
Pin("P2", Pin.OUT), # O4
]
while True:
for o in outputs: # walk a single high pulse across O1–O4
o.value(1)
time.sleep_ms(200)
o.value(0)
Kterýkoli ze čtyř pinů lze také ovládat pomocí PWM přes machine.PWM pro proporcionální buzení — například postupně každý výstup rozsvěcujte a zhasínejte:
from machine import Pin, PWM
import time
outputs = [
PWM(Pin("P7"), freq=1_000, duty_u16=0), # O1
PWM(Pin("P0"), freq=1_000, duty_u16=0), # O2
PWM(Pin("P8"), freq=1_000, duty_u16=0), # O3
PWM(Pin("P2"), freq=1_000, duty_u16=0), # O4
]
while True:
for o in outputs:
for duty in range(0, 65_536, 1024):
o.duty_u16(duty)
time.sleep_ms(5)
for duty in range(65_535, -1, -1024):
o.duty_u16(duty)
time.sleep_ms(5)
Ostatní I/O¶
Čtěte vstup svorkovnice AIN přes úrovňově posunutý pin P6:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reagujte na sestupnou hranu na lince SYN — například pro synchronizaci kamery s jiným zařízením, které stahuje SYN na nízkou úroveň:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)