Driver Shield¶
Driver Shieldは、6~36 Vの広い電源範囲から3 Aのモーター2個、または独立した1.5 Aのラインドライバー4個を駆動でき、逆電圧保護とサージ保護を備えた堅牢なモーター制御フロントエンドをOpenMV Camに提供します。
完全なデータシート、写真、注文方法については、Driver Shield製品ページ を参照してください。
主な特長¶
3 Aデュアルモータードライバー、または1.5 Aクアッドラインドライバー、6~36 V対応
入力側に逆電圧保護および過渡サージ保護
±36 Vの過電圧保護付き0~5 V ADC入力
カメラ同期トリガー用の0~5 Vデジタル I/O、短絡保護付き
ピン配置¶
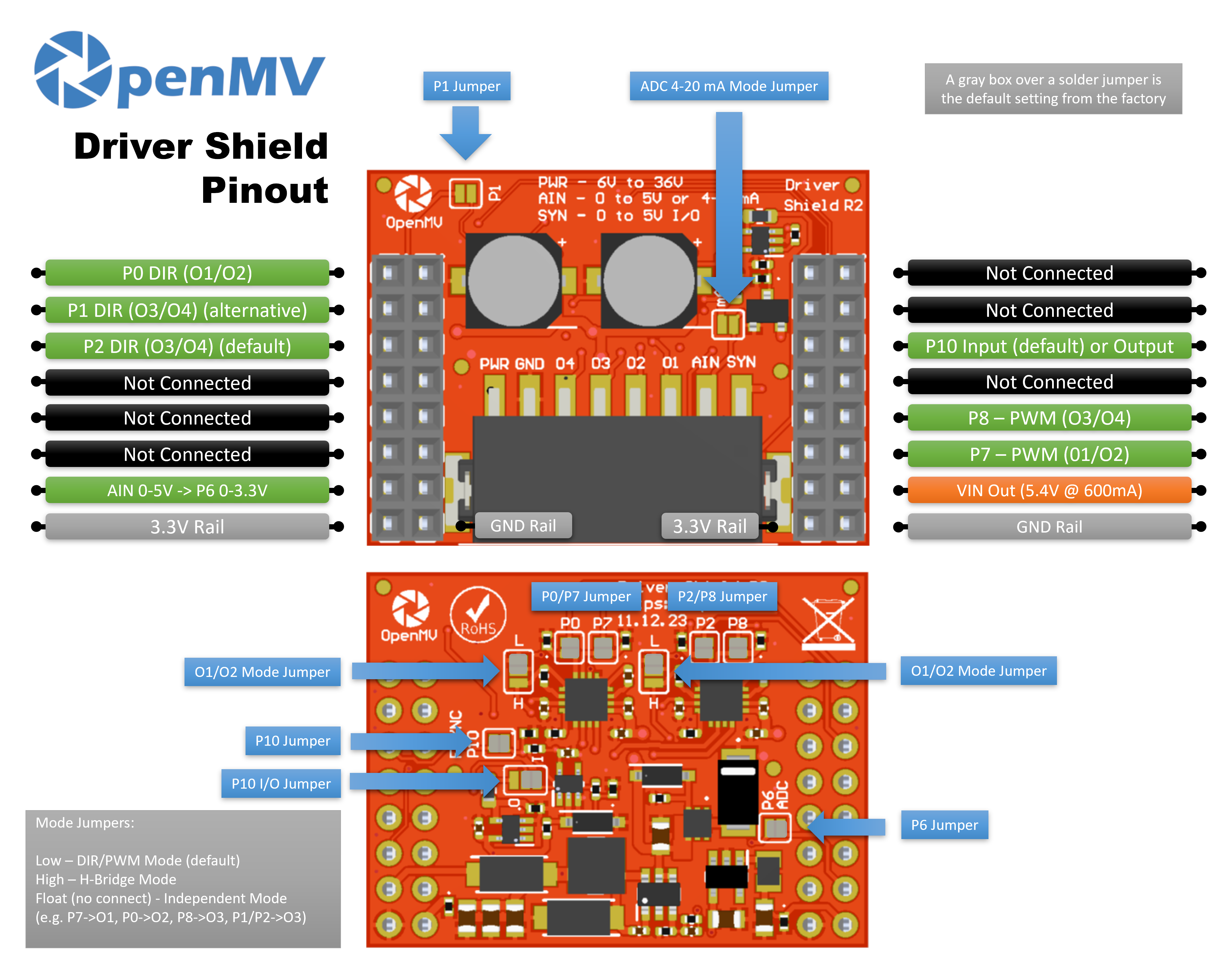
ピンリファレンス¶
ピン |
機能 |
|---|---|
P0 |
出力ペアO1/O2のDIR |
P1 |
出力ペアO3/O4のDIR(代替) |
P2 |
出力ペアO3/O4のDIR(デフォルト) |
P6 |
レベルシフトされたAINリードバック(P6上で0~3.3 V) |
P7 |
出力ペアO1/O2のPWM |
P8 |
出力ペアO3/O4のPWM |
P10 |
SYN — ターミナルブロック上のオープンドレインデジタル I/O |
PWR入力 |
ターミナルブロック上の6~36 V広入力(逆電圧耐性あり) |
AIN入力 |
ターミナルブロック上のアナログ入力 |
VIN出力 |
オンボードレギュレータから最大600 mAで5.4 V |
3.3Vレール |
シールドのオンボード回路に電源を供給 |
GNDレール |
共通グラウンド |
注釈
AINは±36 Vまでの過電圧保護を備えており、デフォルトでは0~5 Vの電圧入力で、P6上では0~3.3 Vにスケールダウンされます。シールド前面の4~20 mAモードシャントをブリッジすると、AINを4~20 mAの電流ループ入力に切り替えられます。
注釈
SYNはオープンドレインのデジタルラインで、カメラ側で3.3 V、SYNターミナル側で5 Vにプルアップされています。デフォルトでは入力で、シールドがSYN上の0~5 VをP10上の0~3.3 Vにレベルシフトします。オンボードのはんだジャンパーを変更すると、P10を出力に切り替え、P10上の0~3.3 VをSYN上の0~5 Vにレベルシフトできます。
注釈
P0、P1、P2、P6、P7、P8、P10はそれぞれ無関係な用途に転用できます。P0、P2、P6、P7、P8、P10はデフォルトで裏面のはんだジャンパーを通じて接続されています。解放したいピンのジャンパーを開放してください。P1はデフォルトで未接続です。前面のジャンパーをブリッジすると、O3/O4のDIRをP1に代わりにルーティングできます(同時にP2を解放するためP2の裏面ジャンパーを開放してください)。
注釈
シールド裏面の2つのモードジャンパー(Hブリッジごとに1つ)で、各出力ペアを3つのモードのいずれかに独立して設定します。各ジャンパーにはLとHのマーキングがあり、どちらの側がどの状態を選択するかを示しています。
Low(デフォルト) — DIR/PWMモード:ブリッジごとにDIRピン1本とPWMピン1本。
High — Hブリッジモード:両方のピンがチップの2入力真理値表を介してブリッジを直接駆動します。
Float(未接続) — 独立モード:各ピンが1つの出力にルーティングされる単独のラインドライバーになります。
各DRV8876はチップあたり合計3 Aに電流制限されています。つまり、1つのブリッジを通じて3 A(DIR/PWMまたはHブリッジモード)、または2つの出力に分割して1出力あたり1.5 A(独立モード)です。
使い方¶
DIR/PWMモード(デフォルト)¶
出力ペアO1/O2上でブラシ付きDCモーターを駆動します。P0で方向を設定し、P7にPWM速度信号を印加します。以下のループは、デューティサイクルを全速まで上げてから下げ、その後方向を反転して繰り返します:
from machine import Pin, PWM
import time
direction = Pin("P0", Pin.OUT)
speed = PWM(Pin("P7"), freq=20_000, duty_u16=0)
def ramp(target):
for duty in range(0, target, 1024):
speed.duty_u16(duty)
time.sleep_ms(10)
for duty in range(target, -1, -1024):
speed.duty_u16(duty)
time.sleep_ms(10)
while True:
direction.value(1) # forward
ramp(65_535)
direction.value(0) # reverse
ramp(65_535)
2つのHブリッジはバイポーラステッパーも駆動できます。両方のPWMチャンネルを全駆動に保ち、DIRピンを4相シーケンスで進めます:
from machine import Pin, PWM
import time
dir12 = Pin("P0", Pin.OUT)
dir34 = Pin("P2", Pin.OUT)
PWM(Pin("P7"), freq=20_000, duty_u16=65_535) # full drive on O1/O2
PWM(Pin("P8"), freq=20_000, duty_u16=65_535) # full drive on O3/O4
SEQUENCE = [(1, 1), (0, 1), (0, 0), (1, 0)]
def step(forward=True):
for a, b in SEQUENCE if forward else reversed(SEQUENCE):
dir12.value(a)
dir34.value(b)
time.sleep_ms(5)
while True:
for _ in range(50): # ~1 revolution forward (200 phases)
step()
for _ in range(50): # ~1 revolution backward
step(forward=False)
Hブリッジモード¶
モードジャンパーをHighに設定すると、両方のブリッジピンがHブリッジを直接駆動します。O1/O2の真理値表は次のとおりです。
(P0, P7) = (L, L)→ コースト(出力Hi-Z)(P0, P7) = (L, H)→ 正転(O1 = H、O2 = L)(P0, P7) = (H, L)→ 逆転(O1 = L、O2 = H)(P0, P7) = (H, H)→ ブレーキ(両出力ともLow)
(O3/O4はP1/P2およびP8で同じ表に従います。)以下のループは、出力ペアO1/O2上でモーターを正転 → ブレーキ → 逆転 → コーストと循環させます:
from machine import Pin
import time
p0 = Pin("P0", Pin.OUT)
p7 = Pin("P7", Pin.OUT)
def drive(a, b):
p0.value(a)
p7.value(b)
while True:
drive(0, 1) # forward
time.sleep(1)
drive(1, 1) # brake
time.sleep_ms(500)
drive(1, 0) # reverse
time.sleep(1)
drive(0, 0) # coast
time.sleep_ms(500)
いずれのピンも比例駆動のために machine.PWM チャンネルに置き換えられます。例えば (P0=0, P7=PWM) はPWMデューティで正転/コースト、(P0=1, P7=PWM) は (100 % − duty) で逆転/ブレーキになります。以下のループは、P0を0に保ったまま(正転/コースト)デューティを上げてから下げます:
from machine import Pin, PWM
import time
p0 = Pin("P0", Pin.OUT, value=0)
p7 = PWM(Pin("P7"), freq=20_000, duty_u16=0)
while True:
for duty in range(0, 65_536, 1024):
p7.duty_u16(duty)
time.sleep_ms(10)
for duty in range(65_535, -1, -1024):
p7.duty_u16(duty)
time.sleep_ms(10)
独立モード¶
モードジャンパーをFloatにすると、各ピンが1つの出力にルーティングされる単独のラインドライバーになります。これはソレノイド、リレー、またはHブリッジを必要としないオン/オフ負荷に便利です。マッピングはP7 → O1、P0 → O2、P8 → O3、P1(またはP2)→ O4です:
from machine import Pin
import time
outputs = [
Pin("P7", Pin.OUT), # O1
Pin("P0", Pin.OUT), # O2
Pin("P8", Pin.OUT), # O3
Pin("P2", Pin.OUT), # O4
]
while True:
for o in outputs: # walk a single high pulse across O1–O4
o.value(1)
time.sleep_ms(200)
o.value(0)
4本のピンはいずれも比例駆動のために machine.PWM 経由でPWMすることもできます。例えば、各出力を順番にフェードイン/フェードアウトさせます:
from machine import Pin, PWM
import time
outputs = [
PWM(Pin("P7"), freq=1_000, duty_u16=0), # O1
PWM(Pin("P0"), freq=1_000, duty_u16=0), # O2
PWM(Pin("P8"), freq=1_000, duty_u16=0), # O3
PWM(Pin("P2"), freq=1_000, duty_u16=0), # O4
]
while True:
for o in outputs:
for duty in range(0, 65_536, 1024):
o.duty_u16(duty)
time.sleep_ms(5)
for duty in range(65_535, -1, -1024):
o.duty_u16(duty)
time.sleep_ms(5)
その他のI/O¶
レベルシフトされたP6ピンを通じて、AINターミナルブロック入力を読み取ります:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
SYNラインの立ち下がりエッジに反応します。例えば、SYNをLowに引っ張る別のデバイスとカメラを同期させる場合です:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)