Driver Shield¶
O Driver Shield aciona dois motores de 3 A ou quatro line drivers independentes de 1,5 A a partir de uma fonte ampla de 6-36 V, dando à OpenMV Cam um front-end robusto de controle de motores com proteção contra tensão reversa e surtos.
Para o datasheet completo, fotos e informações de compra, consulte a página do produto Driver Shield.
Destaques¶
Dois motor drivers de 3 A OU quatro line drivers de 1,5 A, 6-36 V
Proteção contra tensão reversa e surtos transitórios na entrada
Entrada ADC de 0-5 V com proteção contra sobretensão de ±36 V
I/O digital de 0-5 V para gatilhos de sincronização da câmera, com proteção contra curto-circuito
Pinagem¶
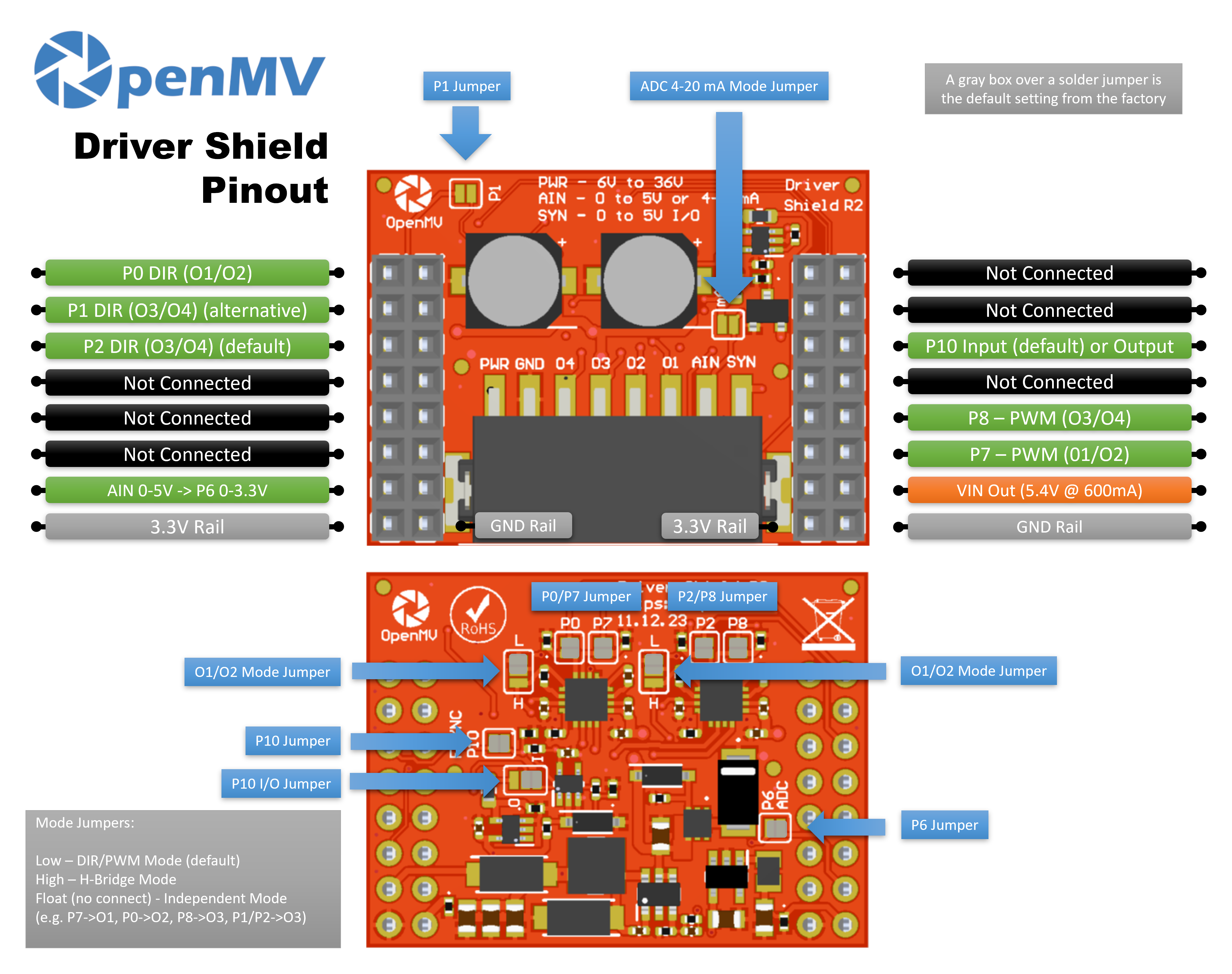
Referência de pinos¶
Pino |
Função |
|---|---|
P0 |
DIR para o par de saídas O1/O2 |
P1 |
DIR para o par de saídas O3/O4 (alternativa) |
P2 |
DIR para o par de saídas O3/O4 (padrão) |
P6 |
Leitura de AIN com nível deslocado (0–3,3 V em P6) |
P7 |
PWM para o par de saídas O1/O2 |
P8 |
PWM para o par de saídas O3/O4 |
P10 |
SYN — I/O digital open-drain no bloco de terminais |
PWR in |
Entrada ampla de 6–36 V no bloco de terminais (tolerante a tensão reversa) |
AIN in |
Entrada analógica no bloco de terminais |
VIN out |
5,4 V a até 600 mA do regulador integrado |
trilho 3.3V |
Alimenta a eletrônica integrada do shield |
trilho GND |
Terra comum |
Nota
AIN tem proteção contra sobretensão de até ±36 V e, por padrão, é uma entrada de tensão de 0–5 V, reduzida para 0–3,3 V em P6. Faça a ponte do shunt do modo 4–20 mA na frente do shield para alternar AIN para uma entrada de loop de corrente de 4–20 mA.
Nota
SYN é uma linha digital open-drain, com pull-up para 3,3 V no lado da câmera e 5 V no lado do terminal SYN. Por padrão é uma entrada — o shield desloca o nível de 0–5 V em SYN para 0–3,3 V em P10. Altere o jumper de solda integrado para inverter P10 em uma saída, deslocando o nível de 0–3,3 V em P10 para 0–5 V em SYN.
Nota
Cada um dos pinos P0, P1, P2, P6, P7, P8 e P10 pode ser reaproveitado para uso não relacionado. P0, P2, P6, P7, P8 e P10 são conectados por padrão através de jumpers de solda no lado traseiro — abra o jumper de qualquer pino que você queira liberar. P1 vem desconectado por padrão: faça a ponte de seu jumper frontal para rotear DIR de O3/O4 para P1 em vez disso (e abra o jumper traseiro de P2 para liberar P2).
Nota
Dois jumpers de modo na parte traseira do shield — um por ponte H — configuram independentemente cada par de saídas em um de três modos. Cada jumper tem marcações L e H para mostrar qual lado seleciona qual estado:
Baixo (padrão) — modo DIR/PWM: um pino DIR + um pino PWM por ponte.
Alto — modo ponte H: ambos os pinos acionam a ponte diretamente através da tabela-verdade de duas entradas do chip.
Flutuante (sem conexão) — modo independente: cada pino se torna um line driver autônomo roteado para uma saída.
Cada DRV8876 tem limite de corrente de 3 A no total por chip — isto é, 3 A através de uma ponte (modo DIR/PWM ou ponte H) ou 1,5 A por saída divididos entre as duas saídas (modo independente).
Uso¶
Modo DIR/PWM (padrão)¶
Acione um motor DC com escovas no par de saídas O1/O2 — defina a direção em P0 e aplique um sinal de velocidade PWM em P7. O loop abaixo aumenta o ciclo de trabalho até a velocidade máxima e o reduz de volta, depois inverte a direção e repete:
from machine import Pin, PWM
import time
direction = Pin("P0", Pin.OUT)
speed = PWM(Pin("P7"), freq=20_000, duty_u16=0)
def ramp(target):
for duty in range(0, target, 1024):
speed.duty_u16(duty)
time.sleep_ms(10)
for duty in range(target, -1, -1024):
speed.duty_u16(duty)
time.sleep_ms(10)
while True:
direction.value(1) # forward
ramp(65_535)
direction.value(0) # reverse
ramp(65_535)
As duas pontes H também podem acionar um motor de passo bipolar — mantenha ambos os canais PWM em acionamento máximo e percorra os pinos DIR pela sequência de quatro fases:
from machine import Pin, PWM
import time
dir12 = Pin("P0", Pin.OUT)
dir34 = Pin("P2", Pin.OUT)
PWM(Pin("P7"), freq=20_000, duty_u16=65_535) # full drive on O1/O2
PWM(Pin("P8"), freq=20_000, duty_u16=65_535) # full drive on O3/O4
SEQUENCE = [(1, 1), (0, 1), (0, 0), (1, 0)]
def step(forward=True):
for a, b in SEQUENCE if forward else reversed(SEQUENCE):
dir12.value(a)
dir34.value(b)
time.sleep_ms(5)
while True:
for _ in range(50): # ~1 revolution forward (200 phases)
step()
for _ in range(50): # ~1 revolution backward
step(forward=False)
Modo ponte H¶
Com o jumper de modo configurado em alto, ambos os pinos da ponte acionam a ponte H diretamente. Para O1/O2 a tabela-verdade é:
(P0, P7) = (L, L)→ livre (saídas em Hi-Z)(P0, P7) = (L, H)→ para frente (O1 = H, O2 = L)(P0, P7) = (H, L)→ para trás (O1 = L, O2 = H)(P0, P7) = (H, H)→ freio (ambas as saídas em baixo)
(O3/O4 segue a mesma tabela com P1/P2 e P8.) O loop abaixo percorre um motor por frente → freio → trás → livre no par de saídas O1/O2:
from machine import Pin
import time
p0 = Pin("P0", Pin.OUT)
p7 = Pin("P7", Pin.OUT)
def drive(a, b):
p0.value(a)
p7.value(b)
while True:
drive(0, 1) # forward
time.sleep(1)
drive(1, 1) # brake
time.sleep_ms(500)
drive(1, 0) # reverse
time.sleep(1)
drive(0, 0) # coast
time.sleep_ms(500)
Qualquer pino pode ser trocado por um canal machine.PWM para acionamento proporcional — por exemplo, (P0=0, P7=PWM) dá frente/livre no ciclo de trabalho do PWM, (P0=1, P7=PWM) dá trás/freio em (100 % − duty). O loop abaixo aumenta o ciclo de trabalho e o reduz de volta com P0 mantido em 0 (frente/livre):
from machine import Pin, PWM
import time
p0 = Pin("P0", Pin.OUT, value=0)
p7 = PWM(Pin("P7"), freq=20_000, duty_u16=0)
while True:
for duty in range(0, 65_536, 1024):
p7.duty_u16(duty)
time.sleep_ms(10)
for duty in range(65_535, -1, -1024):
p7.duty_u16(duty)
time.sleep_ms(10)
Modo independente¶
Com o jumper de modo flutuando, cada pino se torna um line driver autônomo roteado para uma saída — útil para solenoides, relés ou qualquer carga liga/desliga que não precise de uma ponte H. O mapeamento é P7 → O1, P0 → O2, P8 → O3 e P1 (ou P2) → O4:
from machine import Pin
import time
outputs = [
Pin("P7", Pin.OUT), # O1
Pin("P0", Pin.OUT), # O2
Pin("P8", Pin.OUT), # O3
Pin("P2", Pin.OUT), # O4
]
while True:
for o in outputs: # walk a single high pulse across O1–O4
o.value(1)
time.sleep_ms(200)
o.value(0)
Qualquer um dos quatro pinos também pode receber PWM via machine.PWM para acionamento proporcional — por exemplo, fazer cada saída acender e apagar gradualmente, uma de cada vez:
from machine import Pin, PWM
import time
outputs = [
PWM(Pin("P7"), freq=1_000, duty_u16=0), # O1
PWM(Pin("P0"), freq=1_000, duty_u16=0), # O2
PWM(Pin("P8"), freq=1_000, duty_u16=0), # O3
PWM(Pin("P2"), freq=1_000, duty_u16=0), # O4
]
while True:
for o in outputs:
for duty in range(0, 65_536, 1024):
o.duty_u16(duty)
time.sleep_ms(5)
for duty in range(65_535, -1, -1024):
o.duty_u16(duty)
time.sleep_ms(5)
Outros I/O¶
Leia a entrada do bloco de terminais AIN através do pino P6 com nível deslocado:
from machine import ADC
import time
ain = ADC("P6")
while True:
v = ain.read_u16() * 3.3 / 65535
print("AIN:", v * (5.0 / 3.3), "V")
time.sleep_ms(100)
Reaja a uma borda de descida na linha SYN — por exemplo, para sincronizar a câmera com outro dispositivo que puxa SYN para baixo:
from machine import Pin
def on_sync(pin):
print("SYN falling edge")
syn = Pin("P10", Pin.IN)
syn.irq(on_sync, Pin.IRQ_FALLING)