Thermopile Shield¶
O Thermopile Shield dá à OpenMV Cam um arranjo de sensor térmico 16x4 via I2C para imagem térmica de baixa resolução e medição de temperatura por pixel.
Para o datasheet completo, fotos e informações de compra, consulte a página do produto Thermopile Shield.
Destaques¶
Arranjo de sensor térmico 16x4, campo de visão de 60 graus x 16 graus
Temperaturas de objetos de -50 C a 300 C
Pinagem¶
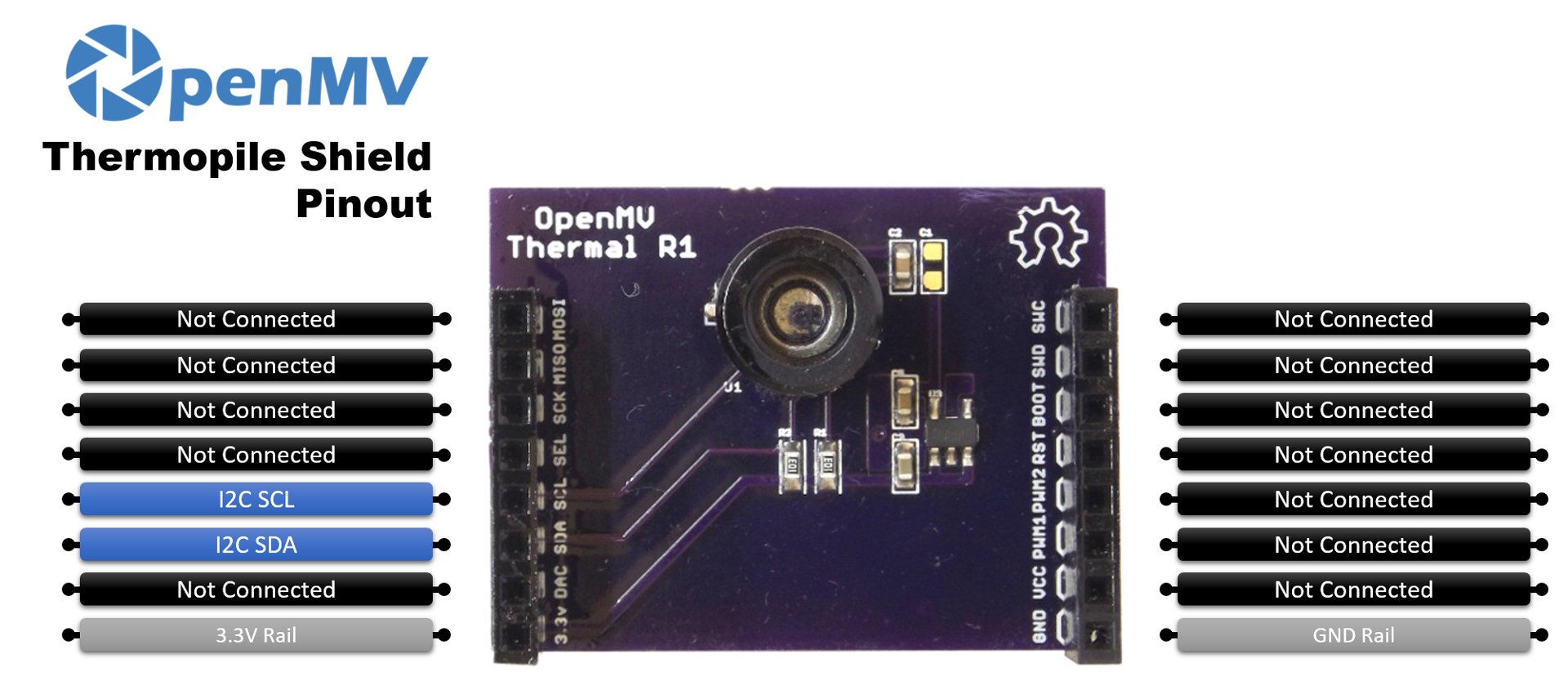
Referência de pinos¶
Pino |
Função |
|---|---|
P4 |
I²C SCL — clock para o arranjo de termopilha |
P5 |
I²C SDA — dados para o arranjo de termopilha |
Trilho 3.3V |
Alimenta a termopilha |
Trilho GND |
Terra comum |
Uso¶
Capture um mapa de calor do arranjo de termopilha embarcado através do módulo fir
import fir
import image
import time
fir.init()
clock = time.clock()
while True:
clock.tick()
try:
img = fir.snapshot(x_scale=10, y_scale=10,
color_palette=image.PALETTE_IRONBOW,
hint=image.BICUBIC,
copy_to_fb=True)
except OSError:
continue
print(clock.fps())
Leia as temperaturas brutas por pixel como um ndarray 16×4 de floats em Celsius. fir.read_ir() também retorna a temperatura ambiente e os valores mínimo/máximo observados no quadro:
import fir
import time
from ulab import numpy as np
fir.init()
w = fir.width()
h = fir.height()
while True:
try:
ta, ir, to_min, to_max = fir.read_ir()
except OSError:
continue
grid = np.array(ir).reshape((h, w))
print("Ambient: %.1f C, range: %.1f to %.1f C, mean: %.1f C"
% (ta, to_min, to_max, np.mean(grid)))
time.sleep(1)