Pan and Tilt Shield¶
Pan and Tilt Shieldは、OpenMV Camに3つのサーボチャンネルを提供します。NCP1117 5 Vリニアレギュレータを搭載し、単一の6.5~18 Vバッテリー入力からカメラとサーボの両方に電源を供給します。

完全なデータシート、写真、注文方法については、Pan and Tilt Shield製品ページ を参照してください。
主な特長¶
独立した3つのサーボチャンネル
Servo Shieldと積み重ね可能
ピン配置¶
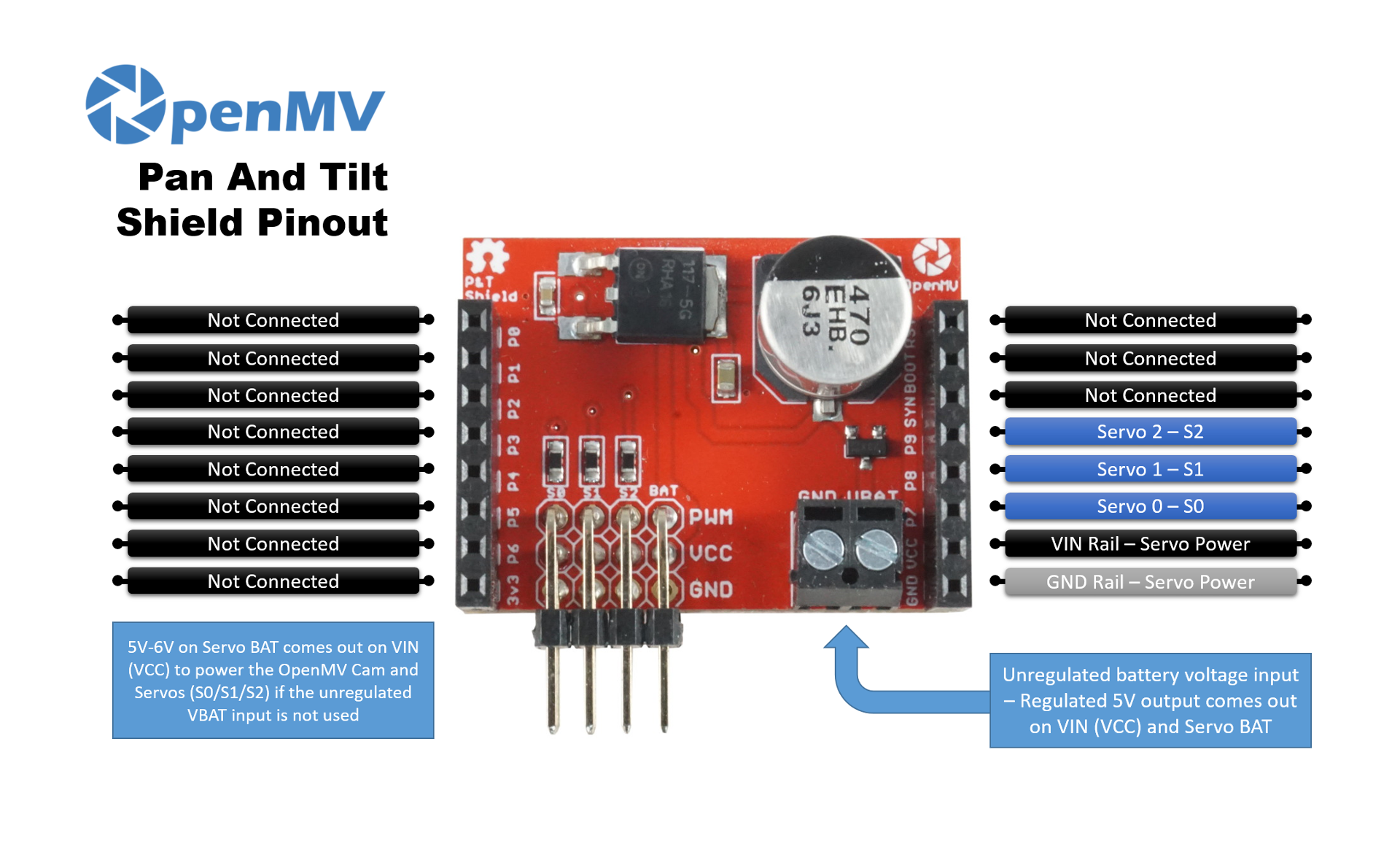
ピンリファレンス¶
ピン |
機能 |
|---|---|
P7 |
サーボ0(S0) |
P8 |
サーボ1(S1) |
P9 |
サーボ2(S2) |
VBAT入力 |
ネジ端子上の6.5~18 Vバッテリー入力(NCP1117の制限) |
VIN出力 |
オンボードNCP1117から5 Vのレギュレート出力 — カメラとサーボレールの両方に電源を供給 |
GNDレール |
サーボとカメラの共通グラウンド |
使い方¶
50 Hz PWMで3つのサーボチャンネルを駆動します。パルス幅の範囲はサーボによって異なるため、お使いのものに合わせて MIN_US と MAX_US を調整してください。一般的な値はおよそ1000~2000 µsです:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)