Pan and Tilt Shield¶
Pan and Tilt Shield antaa OpenMV Cam -kameralle kolme servokanavaa NCP1117 5 V:n lineaarisäätimellä, joka syöttää virran sekä kameralle että servoille yhdestä 6,5–18 V:n akkutulosta.
Täydellisen datalehden, valokuvat ja tilaustiedot löydät Pan and Tilt Shield -tuotesivulta.
Kohokohdat¶
Kolme itsenäistä servokanavaa
Pinottavissa Servo Shieldin kanssa
Nastat¶
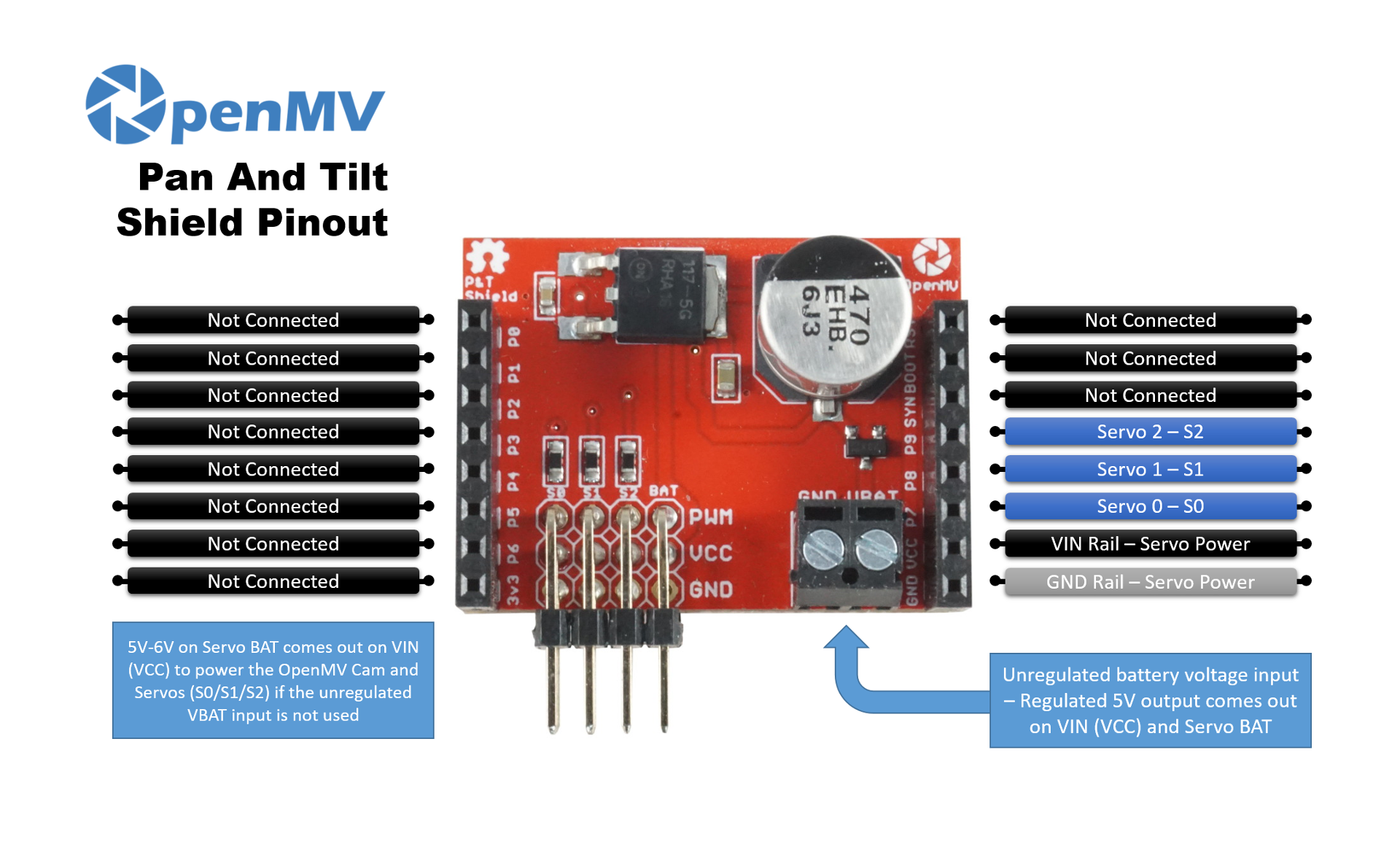
Nastaviite¶
Nasta |
Toiminto |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
6,5–18 V:n akkutulo ruuviliittimessä (NCP1117:n rajat) |
VIN out |
5 V säädettynä kortin omasta NCP1117:stä — syöttää virran sekä kameralle että servokiskolle |
GND-kisko |
Servon ja kameran yhteinen maa |
Käyttö¶
Ohjaa kolmea servokanavaa 50 Hz:n PWM:llä. Pulssinleveysalue vaihtelee servojen välillä, joten viritä MIN_US ja MAX_US vastaamaan omiasi — tyypilliset arvot ovat noin 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)