Pan and Tilt Shield¶
El Pan and Tilt Shield dota a la OpenMV Cam de tres canales de servo con un regulador lineal NCP1117 de 5 V que alimenta tanto la cámara como los servos a partir de una única entrada de batería de 6,5–18 V.
Para consultar la hoja de datos completa, fotos e información de compra, visite la página del producto Pan and Tilt Shield.
Características destacadas¶
Tres canales de servo independientes
Se apila con el Servo Shield
Distribución de pines¶
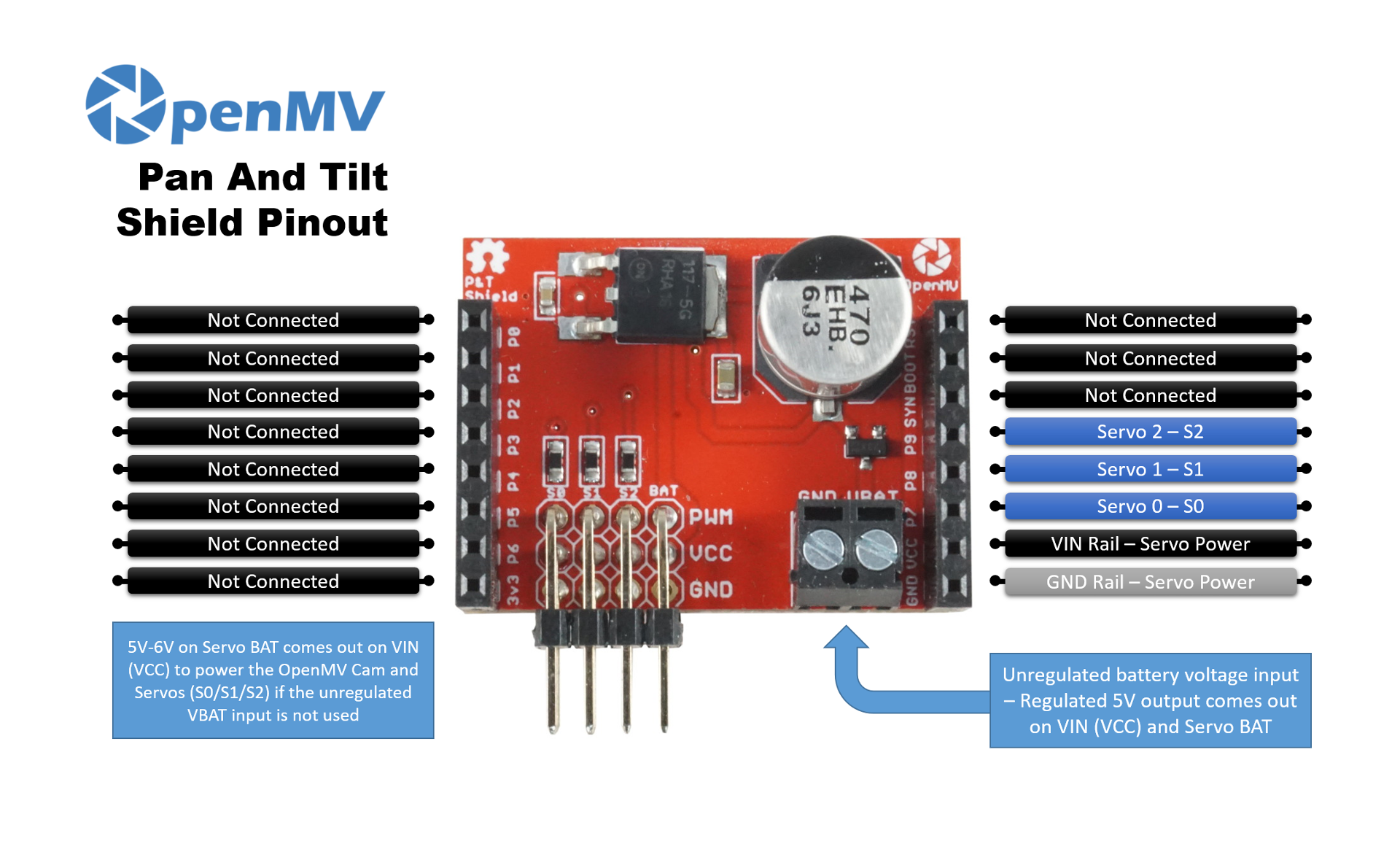
Referencia de pines¶
Pin |
Función |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT in |
Entrada de batería de 6,5–18 V en el terminal de tornillo (límites del NCP1117) |
VIN out |
5 V regulados desde el NCP1117 integrado — alimenta tanto la cámara como la línea de servos |
Línea GND |
Masa común de servos y cámara |
Uso¶
Controle los tres canales de servo con PWM de 50 Hz. El rango de ancho de pulso varía entre servos, así que ajuste MIN_US y MAX_US para que coincidan con los suyos — los valores típicos rondan los 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)