Pan and Tilt Shield¶
Pan and Tilt Shield는 OpenMV Cam에 서보 채널 3개를 제공하며, 단일 6.5~18V 배터리 입력에서 카메라와 서보 모두에 전원을 공급하는 NCP1117 5V 선형 레귤레이터를 갖추고 있습니다.
전체 데이터시트, 사진, 주문 정보는 Pan and Tilt Shield 제품 페이지를 참조하세요.
주요 특징¶
독립적인 서보 채널 3개
Servo Shield와 적층 가능
핀아웃¶
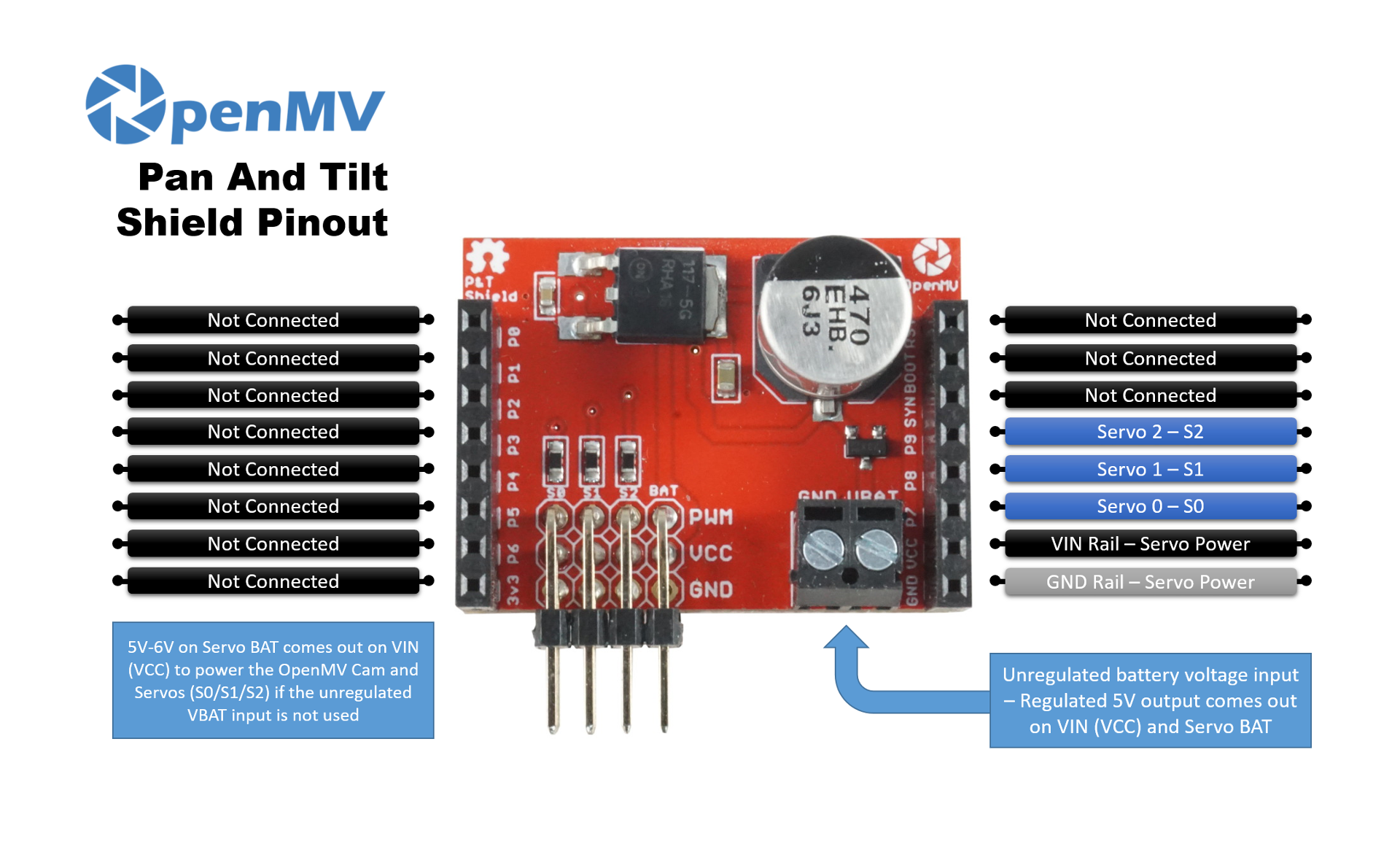
핀 참조¶
핀 |
기능 |
|---|---|
P7 |
서보 0(S0) |
P8 |
서보 1(S1) |
P9 |
서보 2(S2) |
VBAT in |
나사 단자대의 6.5~18V 배터리 입력(NCP1117 제한) |
VIN out |
온보드 NCP1117에서 5V로 레귤레이션 — 카메라와 서보 레일 모두에 전원 공급 |
GND 레일 |
서보 및 카메라 공통 접지 |
사용법¶
50Hz PWM으로 서보 채널 3개를 구동합니다. 펄스 폭 범위는 서보마다 다르므로, MIN_US와 MAX_US를 자신의 서보에 맞게 조정하세요 — 일반적인 값은 약 1000~2000µs입니다:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)