Pan and Tilt Shield¶
Pan and Tilt Shield wyposaża OpenMV Cam w trzy kanały serwomechanizmów ze stabilizatorem liniowym 5 V NCP1117, który zasila zarówno kamerę, jak i serwomechanizmy z pojedynczego wejścia bateryjnego 6,5–18 V.
Pełną dokumentację techniczną, zdjęcia i informacje o zamówieniu znajdziesz na stronie produktu Pan and Tilt Shield.
Najważniejsze cechy¶
Trzy niezależne kanały serwomechanizmów
Łączy się w stos z Servo Shield
Rozkład wyprowadzeń¶
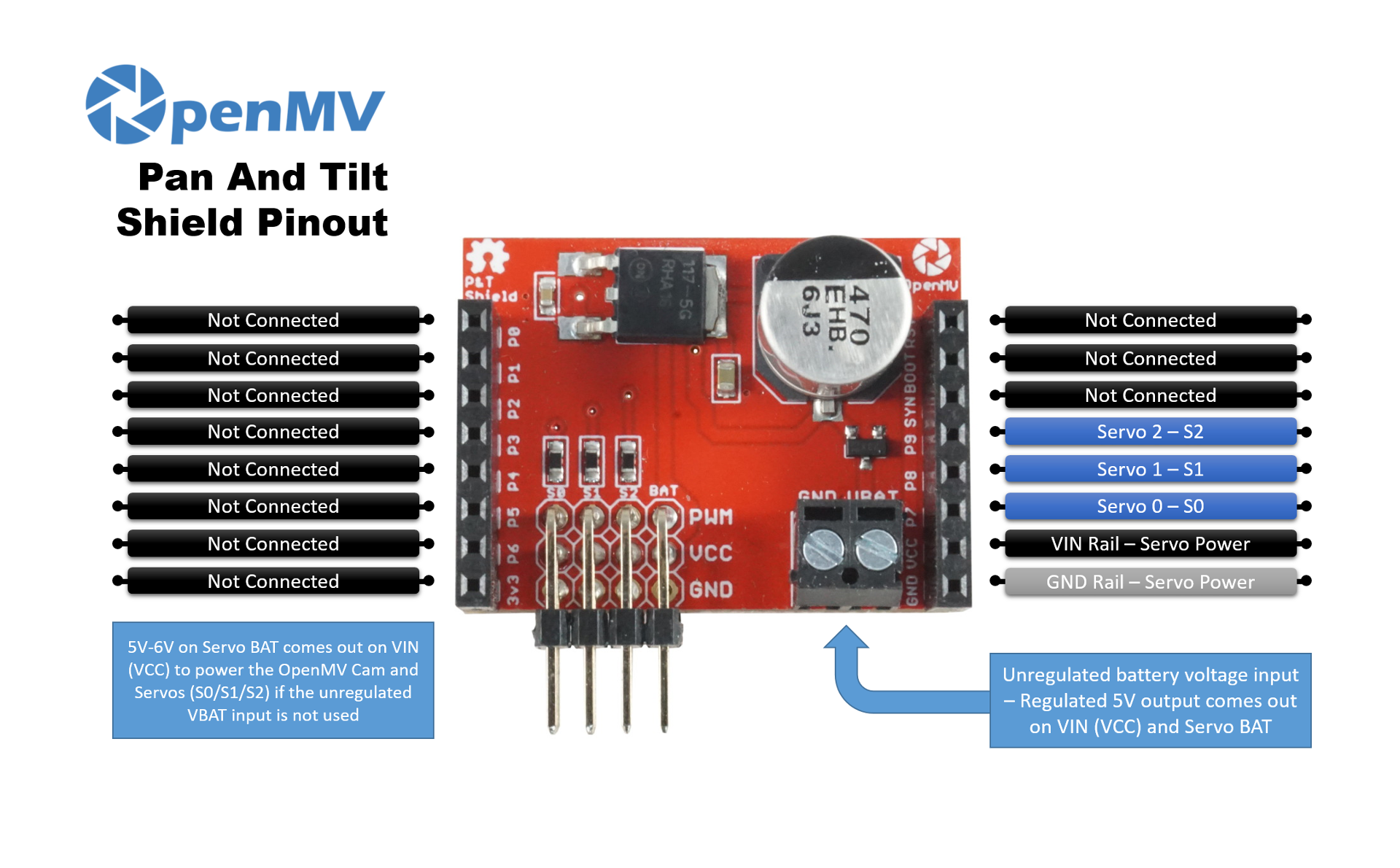
Opis wyprowadzeń¶
Pin |
Funkcja |
|---|---|
P7 |
Serwomechanizm 0 (S0) |
P8 |
Serwomechanizm 1 (S1) |
P9 |
Serwomechanizm 2 (S2) |
VBAT in |
Wejście bateryjne 6,5–18 V na zacisku śrubowym (ograniczenia NCP1117) |
VIN out |
5 V stabilizowane ze stabilizatora NCP1117 na płytce — zasila zarówno kamerę, jak i szynę serwomechanizmów |
Szyna GND |
Wspólna masa serwomechanizmów i kamery |
Zastosowanie¶
Steruj trzema kanałami serwomechanizmów przy PWM 50 Hz. Zakres szerokości impulsu różni się między serwomechanizmami, więc dostrój MIN_US i MAX_US do swoich — typowe wartości to około 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)