Pan and Tilt Shield¶
Das Pan and Tilt Shield verleiht der OpenMV Cam drei Servokanäle mit einem linearen NCP1117-5-V-Regler, der sowohl die Kamera als auch die Servos aus einem einzigen 6,5–18-V-Batterieeingang versorgt.

Vollständiges Datenblatt, Fotos und Bestellinformationen finden Sie auf der Pan-and-Tilt-Shield-Produktseite.
Höhepunkte¶
Drei unabhängige Servokanäle
Stapelbar mit dem Servo Shield
Pinbelegung¶
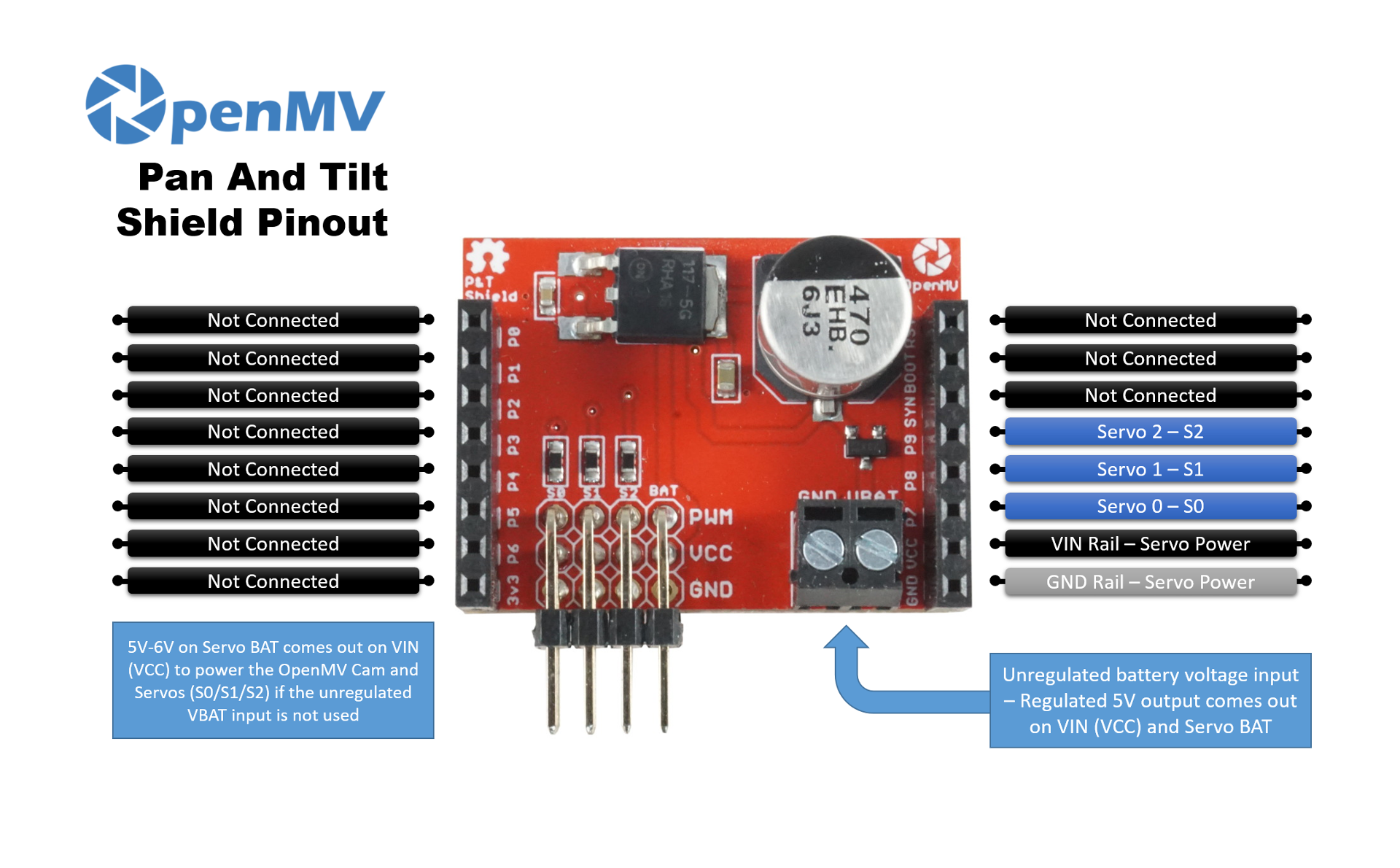
Pin-Referenz¶
Pin |
Funktion |
|---|---|
P7 |
Servo 0 (S0) |
P8 |
Servo 1 (S1) |
P9 |
Servo 2 (S2) |
VBAT ein |
6,5–18-V-Batterieeingang an der Schraubklemme (NCP1117-Grenzwerte) |
VIN aus |
5 V geregelt vom integrierten NCP1117 — versorgt sowohl die Kamera als auch die Servoschiene |
GND-Schiene |
Gemeinsame Masse von Servo und Kamera |
Verwendung¶
Steuern Sie die drei Servokanäle mit 50-Hz-PWM an. Der Impulsbreitenbereich variiert zwischen Servos, stellen Sie also MIN_US und MAX_US passend zu Ihren ein — typische Werte liegen bei etwa 1000–2000 µs:
from machine import Pin, PWM
import time
MIN_US = 1000 # full-left pulse width (microseconds)
MAX_US = 2000 # full-right pulse width
pan = PWM(Pin("P7"), freq=50) # S0
tilt = PWM(Pin("P8"), freq=50) # S1
aux = PWM(Pin("P9"), freq=50) # S2
def angle(servo, deg):
pulse_us = MIN_US + (deg * (MAX_US - MIN_US)) // 180
servo.duty_ns(pulse_us * 1000)
while True:
angle(pan, 0)
angle(tilt, 90)
time.sleep(1)
angle(pan, 180)
angle(tilt, 45)
time.sleep(1)